智能制造工业技术生产线教学实训系统建设方案
一、 平台整体概述
1.1整体概述
智能制造工业技术生产线教学实训系统既能够独立使用、自成系统,可分别让学生在每种设备上进行课程训练、毕业设计,并且可根据生产现代工艺流程完成组合功能,能够组合成流水线使用,组合后可完成货物的供给、检测、分类、加工、传输、搬运、加热、仓储等过程。
系统可满足《PLC原理及应用》《PLC网络技术》《机电一体化系统设计与应用》《运动控制》《传感器检测技术》《机械传动与控制》《气动技术》《变频调速技术》《人机界面技术》《机器人控制技术》《机械视觉》和《智能控制》等课程的训练教学要求,能够反映出典型的实际工业生产线现场,能清楚地反映工厂生产线中的供料环节、检测环节、加工环节、搬运环节、加热环节、仓储环节等部分,能综合采用多种工厂典型应用的电气设备和机械结构。
智能制造工业技术生产线教学实训系统可涵盖PLC控制技术、传感器检测与装调技术、气动技术、伺服电机驱动技术、步进电机驱动技术、交流电机驱动技术、直流电机驱动技术、工业机器人控制技术、机械结构与系统安装技术、工业视觉技术、工业网络技术、变频调速技术、人机界面及组态技术、执行元件及控制技术、PID控制技术、自动化生产线工作站安装调试与运行技术等。
智能制造工业生产流水线教学实训实训室主要涉及在较为复杂环境下,运用所学的逻辑控制、顺序控制等技能,实现小型自动化传送系统的正常运行。通过对系统状态分析,使学生在实训环境中掌握 PLC程序编写,触摸屏编程,通讯和变频器调试,系统诊断。同时还可进行高级语言编程、柔性生产、工厂数据分析、工艺优化、质量管理等智能制造相关的进阶训练科目内容。

智能制造工业技术生产线教学实训系统

实训室效果图
1.2设计思路
系统采用模块化设计理念,以自动化的物料传输、加工以及加热为对象体现常用的控制、机械传动原理的应用、装置的选择、调试和系统统调。每个教学实训平台可自成系统,可分别让学生在每个单元上进行课程训练、毕业设计,并且可根据生产现代工艺流程完成上述模块化组合功能。
1.3设计特点
① 模块化设计
系统采用模块化设计理念,以自动化的物料传输、加工以及加热为对象体现常用的控制、机械传动原理的应用、装置的选择、调试和系统统调。每个教学实训平台可自成系统,可分别让学生在每个单元上进行课程训练、毕业设计,并且可根据生产现代工艺流程完成上述模块化组合功能。
② 多种控制技术的综合应用
系统集PLC控制技术、PID控制技术、传感器检测与装调技术、气动技术、伺服电机驱动技术、步进电机驱动技术、交流电机驱动技术、直流电机驱动技术、机械结构与系统安装技术、变频调速技术、工业视觉技术、人机界面及组态技术、执行元件及控制技术、自动化生产线工作站安装调试与运行技术等多种现代工业控制技术于一体,能采用现场工业网络技术将各个系统单元连成一套完整的工业生产系统,能实现生产物流系统中的供给、检测、分类、装配、传输、加热、搬运、仓储、管理等过程。
③ 多方位教学功能
系统是一套工业生产线的实验平台,既可满足学校的常规的实验教学目的,也可用于学校科研开发的平台,同时还可为既将毕业的学生作为岗前教学实训的小工业流水线;作为一台实训装置,既可用于电气专业、机电专业的基础技能训练平台,也可用于该专业的技能考核设备。
④ 多种保护功能
系统设计多种保护功能,具有漏电保护、短路保护、急停保护、限位保护、智能保护等各种保护功能。
⑤ 多级网络控制
系统每个教学实训平台也可实现独立控制,整个系统由多个控制站组成,可进行多级网络控制和管理实训。设备在训练时可分为三个层次进行:(1)通用网络组网教学实训;(2)网络控制应用训练;(3)工厂流水线多级网络控制及管理软件、高级语言训练。
⑥ 可扩展性
系统具有可扩展性,具有开放接口,可在原有系统基础上增添其他加工、检测、装配、配货等设备模块,全面兼容标准工业级设备且轻松进行集成。
平台教学内容丰富,具有光、机、电、气等高度集成,基础设备中包含 PLC技术、光电传感器、色标传感器、磁性传感器等多种类型传感器;步进、直流电机等各类技术,教学内容丰富。工业标准化设计,按工业标准设计,完全符合相应的工业产品国家或国际标准,确保设备的高精度与可靠性。同时,具有漏电保护、短路保护、急停保护、限位保护等多种保护功能。具有可扩展性,具有开放接口,可在原有系统基础上增添其他加工、检测、装配、配货等设备模块,全面兼容标准工业级设备且轻松进行集成。
1.4基本功能
智能制造工业生产流水线教学实训设备是通过采用一套能自动进行供料、检测、组装、装卸运输的机器设备,组成高度连续、完全自动化的生产线,来实现产品的生产。系统抽象自真实工业中的自动化生产线,将各分散的学习要素集中起来,组成一个能够让学生参与设计、构建和调试,让更多老师参与研发、设计和学习,让设备不断更新、技术不断前进的系统。系统为学生提供了一种崭新的综合实验平台,使他们能够综合运用所学知识设计、构建各种较大规模的自动化生产系统模型。
1.5配置清单
|
序号 |
工艺单元 |
设备名称 |
数量 |
单位 |
|
1 |
物料供给教学实训平台 |
PLC控制器 |
1 |
套 |
|
2 |
移动型材工作台 |
1 |
套 |
|
3 |
不锈钢网孔板 |
1 |
套 |
|
4 |
多通道井式供料机 |
1 |
套 |
|
5 |
带式传输机构 |
1 |
套 |
|
6 |
智能接口单元及控制面板 |
1 |
套 |
|
7 |
气路控制装置 |
1 |
套 |
|
8 |
物料检测教学实训平台 |
PLC控制器 |
1 |
套 |
|
9 |
移动型材工作台 |
1 |
套 |
|
10 |
不锈钢网孔板 |
1 |
套 |
|
11 |
智能传感器检测单元 |
1 |
套 |
|
12 |
机器视觉检测单元 |
1 |
套 |
|
13 |
带式传输机构 |
1 |
套 |
|
14 |
废品收回槽 |
1 |
套 |
|
15 |
智能接口单元及控制面板 |
1 |
套 |
|
16 |
气路控制装置 |
1 |
套 |
|
17 |
多工位加工训练平台 |
PLC控制器 |
1 |
套 |
|
18 |
移动型材工作台 |
1 |
套 |
|
19 |
不锈钢网孔板 |
1 |
套 |
|
20 |
冲压装置 |
1 |
套 |
|
21 |
供料装置 |
1 |
套 |
|
22 |
多工位旋转工作台 |
1 |
套 |
|
23 |
带式传输机构 |
1 |
套 |
|
24 |
智能接口单元及控制面板 |
1 |
套 |
|
25 |
气路控制装置 |
1 |
套 |
|
26 |
直线行走搬运仓储教学实训平台 |
PLC控制器 |
1 |
套 |
|
27 |
移动型材工作台 |
1 |
套 |
|
28 |
不锈钢网孔板 |
1 |
套 |
|
29 |
库体工作台 |
1 |
套 |
|
30 |
直角坐标机器人搬运装置 |
1 |
套 |
|
31 |
带式传输机构1 |
1 |
套 |
|
32 |
带式传输机构2 |
1 |
套 |
|
33 |
推料装置 |
1 |
套 |
|
34 |
智能预诊断模块 |
1 |
套 |
|
35 |
智能接口单元及控制面板 |
1 |
套 |
|
36 |
温度控制教学实训平台 |
PLC控制器 |
1 |
套 |
|
37 |
移动型材工作台 |
1 |
套 |
|
38 |
不锈钢网孔板 |
1 |
套 |
|
39 |
加热炉 |
1 |
套 |
|
40 |
带式传输机构 |
1 |
套 |
|
41 |
触摸屏单元 |
1 |
套 |
|
42 |
智能接口单元及控制面板 |
1 |
套 |
|
43 |
自动化仓库教学实训平台 |
PLC控制器 |
1 |
套 |
|
44 |
移动型材工作台 |
1 |
套 |
|
45 |
不锈钢网孔板 |
1 |
套 |
|
46 |
KUKA工业机器人单元 |
1 |
套 |
|
47 |
机器人夹具 |
1 |
套 |
|
48 |
立体仓库主体 |
1 |
套 |
|
49 |
平面轨迹单元 |
1 |
套 |
|
50 |
气路控制装置 |
1 |
套 |
|
51 |
交换机 |
1 |
套 |
|
52 |
智能接口单元及控制面板 |
1 |
套 |
二、 平台技术组成
2.1 物料供给教学实训平台
物料供给教学实训平台由PLC、移动型材工作台、控制屏、多通道井式供料机、带式传输机构、智能接口单元及控制面板、气路控制装置等组成。

2.1.1 PLC控制器
含1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米;

2.1.2移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:560mm×780mm,工作台高度:750mm。
2.1.3不锈钢网孔板
含不锈钢网孔板(435×584mm)、西门子空气开关1P10A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.1.4多通道井式供料机
含2个井式供料塔、2套货料检测传感装置、1套供料塔移动装置、1套货物推出装置以及型材基体等组成。
每个井式供料塔含6根光轴组成的圆柱型塔身和1个长方形塔座。供料塔整体高度为230mm,库体内径为38mm、外径为58mm。
每套货料检测传感装置含1个回归反射型(带偏极滤光器)传感器、1个专用反射镜及1套传感器支架。
每套供料塔移动装置含1个移动底座、2根不锈钢光轴、4个直线轴承、1个供料塔移动气缸、2个调速快接头、2个接近开关、2个接近开关支架。
每套货物推出装置含1个推料气缸、2个磁性开关、2个磁性开关固定装置、2个调速快接头(90°弯头)、1套推料气缸支架、1个铝制推出装置。
2.1.5带式传输机构
含1条同步带(宽度≥30mm)、1条90XL 037同步带、2个14XL 037(%6 带扁)同步轮、1台直流电机(DC24V)、1套直流电机连接架、1套动力驱动装置、1套带式传输装置支架。
2.1.6智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
2.1.7气路控制装置
含汇流排(二位)、汇流排消音器、汇流排快接头、汇流排(二位)支架、电磁阀(单驱)、电磁阀(双驱)、电磁阀快接头、Φ4气管。
2.2物料检测教学实训平台
物料检测教学实训平台由PLC、移动型材工作台、控制屏、传感器检测单元、机器视觉检测单元、带式传输机构、废品收回槽、智能接口单元及控制面板、气路控制装置等组成。

2.2.1 PLC控制器
含1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米。
2.2.2移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:560mm×780mm,工作台高度:750mm。
2.2.3不锈钢网孔板
含不锈钢网孔板(435x584mm)、西门子空气开关1P10A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.2.4智能传感器检测单元
1套回归反射型(带偏极滤光器)传感器、1个专用反射镜、1套传感器支架、1套反射镜支架、门限型材。1个电感传感器,1套智能色标传感器、1套智能色标传感器支架等。
2.2.5机器视觉检测单元
智能视觉采用海康威视的机器视觉,可对各种对象进行识别与检测,例如物品颜色、物品种类、物品位置,将识别检测后的数据传递给PC或PLC控制系统,为控制系统的控制提供准确数据。主要组成如下:
(1)环形视觉光源
 1)发光尺寸:65mm 环形;
1)发光尺寸:65mm 环形;
2)颜色:白色;
3)电压:24V;
4)功率:5.9W;
5)色温:6000-7000K;
6)照射角度:90度;
7)供电接口类型:SMR-03V-B 。
 (2)光源控制器
(2)光源控制器
1)驱动方式:恒压;
2)输出电压:24VDC;
3)总功率:24W;
4)输出通道:2路;
5)供电电压:100V-240VAC 50/60Hz。
(3)FA镜头
FA镜头采用海康镜头,镜头针对机器视觉光源和芯片进行优化设计,分辨率高,成像质量优秀,透过率高,稳定性好。固定焦距,手动光圈,外形紧凑。可满足机器视觉行业应用,是工业相机的理想选择。
1)功能特性:
①超高分辨率,画面清晰度一致;
②低畸变,优异的相对照度;
③消色差设计,搭配彩色相机成像更佳;
④高低温稳定性出色,适用于严苛环境;
⑤微距效果表现优秀,近距离下光学性能出色。
 2)镜头主要参数(数量:1件)
2)镜头主要参数(数量:1件)
①靶面尺寸: 2/3″;
②焦距: 25mm;
③最短物距:0. 1m;
④光圈控制方式:手动调整;
⑤聚焦控制方式:手动调整;
⑥畸变:0.28%;
⑦接口类型:C-Mount;
⑧像素:800万;
⑨外形尺寸:φ30×38.59mm。
(4)工业相机
 工业相机采用海康MV-CS050-10GC-PRO二代工业面阵彩色相机,采用SONY的IMX264 CMOS芯片,动态范围高,信噪比好,图像质量优异。通过千兆以太网接口传输图像,可快速实施传输数据,全分辨率下的帧率可达24.2fps,无损压缩模式下可达35.6fps。
工业相机采用海康MV-CS050-10GC-PRO二代工业面阵彩色相机,采用SONY的IMX264 CMOS芯片,动态范围高,信噪比好,图像质量优异。通过千兆以太网接口传输图像,可快速实施传输数据,全分辨率下的帧率可达24.2fps,无损压缩模式下可达35.6fps。
1)功能特性:
①全新硬件平台,优化逻辑资源,大幅降低功耗;
②支持自动或手动调节增益、曝光时间、白平衡、LUT、Gamma 校正等;
③相机植入无损压缩、降噪、CCM 等功能;
④千兆网接口,无中继情况下,最大传输距离可达100m;
⑤新一代外观结构设计,支持四面安装;
⑥兼容GigE Vision V2.0 协议及GenlCam 标准,无缝接入第三方软件。
2)主要参数
①像素:500万
②传感器类型:2/3″CMOS;
③快门类型:全局快门;
④相机类型:彩色;
⑤GPIO:1 路光耦隔离输入(Line0),1 路光耦隔离输出(Line1),1 路双向可配置非隔离I/O(Line2);
⑥采集模式:连续性/软触发/硬触发;
⑦镜头接口:C-Mount接口;
⑧镜像:支持水平镜像、垂直镜像输出;
⑨数据接口:Gigabit Ethernet(1000Mbit/s)兼容Fast Ethernet(100Mbit/s)
⑩典型功耗:2.9W;供电:9-24VDC,支持POE供电。
(5)标定板套件
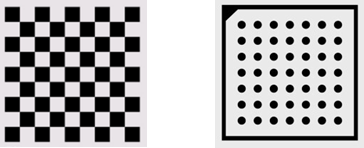 标定板用于机器视觉的手眼标定,采用两种标定板,分别是棋盘格标定板和圆点标定板。
标定板用于机器视觉的手眼标定,采用两种标定板,分别是棋盘格标定板和圆点标定板。
1)9×9棋盘格标定板
①外形尺寸:100×100mm
②方格边长:8mm
③图案尺寸:72×72mm
2)7×7实心圆点标定板
①外形尺寸:100×100mm
②直径:φ5mm
③中心距:10mm
④图案尺寸:80×80mm
(6)图像处理软件
1)功能包括:有无/正反检测、颜色/位置判断、定位、2D尺寸测量、ID识别、字符识别等;
2)提供定位功能:13个,包括快速特征匹配、高精度特征匹配、圆查找、Blob分析、卡尺工具、边缘查找、边缘交点、平行线查找等;
3)提供测量工具:12个,包括线圆测量、线线测量、圆拟合、直线拟合、像素统计、直方图工具等;
4)标定工具:6个,包括标定板标定、N点标定、畸变标定;
5)对位工具:4个,包括相机映射、点集对位等;
6)图像处理工具:14个,包括图像组合、形态学处理、图像滤波、图像增强、清晰度评估、仿射变换、圆环展开等;
7)逻辑工具:12个,包括条件检测、格式化、字符比较、点集、耗时统计等;
8)识别工具:4个,包括条码识别、二维码识别等;
9)支持Modbus通信、TCP通信、IO通信等;
(7)配件
①相机配套电源线1根,长度3米;
②相机配套网线1根,长度3米;
③视觉相机安装支架1套,高度500mm;
④视觉光源安装支架1套。
2.2.6带式传输机构
含1条同步带(宽度30mm)、1条90XL 037同步带、2个14XL 037(6% 带扁(同步轮、1台直流电机(DC24V)、1套直流电机连接架、1套同步带张紧装置、1套动力驱动装置、1套带式传输机构支架。
2.2.7废品收回槽
含推料气缸、速快接头、推料气缸支架、铝制推出装置及不锈钢回收库。
不锈钢回收库配有角度可调支架,库体可传输带成水平摆放或倾斜摆放。
2.2.8智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
2.2.9气路控制装置
含电磁阀(0.15-0.9MPa、单驱DC24V 2.5W)、电磁阀支架、电磁阀快接头、快接头、消音器、三通、Φ4气管。
2.3多工位加工训练平台
多工位加工教学实训平台由PLC、移动型材工作台、控制屏、冲压装置、供料装置、多工位旋转工作台、带式传输机构、智能接口单元及控制面板、气路控制装置等组成。

2.3.1 PLC控制器
含1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米;
1个西门子数字量输入模块SM1221,8输入24V DC。
2.3.2移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:560mm×780mm,工作台高度:750mm。
2.3.3不锈钢网孔板
含不锈钢网孔板(435×584mm)、西门子空气开关1P10A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.3.4冲压装置
含1个冲压气缸、1个磁性开关、2个调速快接头(90°弯头)、1套冲压气缸(治具缸)支架、1个铝制冲压装置(直径为13mm)、冲压平台(90*60*20mm、冲压孔直径为18mm、含可调限位装置)。
2.3.5供料装置
含有井式供料塔、货料检测传感机构、推料装置、加紧装置、供料及加紧装置支架。
井式供料塔含圆柱型塔身、长方形塔座、货料托盘、供料塔支架。
货料检测传感机构含有对射式传感器及传感器支架。
推料装置含推料气缸、调速快接头、推料气缸支架、铝制推出装置。
加紧装置含加紧气缸、磁性开关、磁性开关固定装置、速快接头及铝制加紧装置。
2.3.6多工位旋转工作台
含多工位旋转平台、检测机构、1套西门子V90伺服电机驱动机构等。
多工位旋转平台含4个铝制库位、1个铝制旋转盘(带定位孔)、1个接近开关、1个接近开关支架、1个平面推力球轴承、1个齿轮传动装置及型材支架。
检测机构含漫反射光电传感器、传感器支架。
西门子V90伺服电机驱动机构含伺服电机(0.05KW)及其驱动器。
2.3.7带式传输机构
带式传输机构含1条同步带(宽度30mm)、1条90XL 037同步带、2个14XL 037(6% 带扁)同步轮、1台直流电机(DC24V)、1套直流电机连接架、1套同步带张紧装置、1套动力驱动装置、1套带式传输机构支架。
配套推料装置含1套推料气缸、2个调速快接头(90°弯头)、1套推料气缸支架、1个推出装置。
2.3.8智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
2.3.9气路控制装置
含汇流排(四位)、汇流排消音器、汇流排快接头、汇流排(四位)支架、电磁阀、电磁阀快接头、Φ4气管。
2.4直线行走搬运仓储教学实训平台
直线行走搬运仓储教学实训平台由PLC、移动型材工作台、控制屏、库体工作台、直角坐标机器人搬运装置、带式传输机构1、带式传输机构2、推料装置、智能预诊断系统、智能接口单元及控制面板、气路控制装置等组成。

2.4.1 PLC控制器
含1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米;
1个西门子数字量输入模块SM1221,8输入24V DC,
1个西门子S7-1200 PLC通讯模块CB1241,通讯模块采用RS485通信,通过点到点连接,可进行快速、高性能的串行数据交换。执行的协议:ASCII、USS 驱动协议、Modbus RTU,随后可加载附加协议;使用PLC编程软件可实现简单的参数化过程 ,可直接插入CPU。
2.4.2 移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:560mm×780mm,工作台高度:750mm。
2.4.3 不锈钢网孔板
含不锈钢网孔板((435x584mm))、西门子空气开关4P20A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.4.4 库体工作台
由库体底盘、库体支架以及库位槽等组成。
2.4.5 直角坐标机器人搬运装置
由直角坐标机器人、抓取机构等组成。
直角坐标机器人重复定位精度±0.1mm。
直角坐标机器人配套伺服电机:含2套西门子V90伺服电机(0.1KW)及驱动器(0.1KW带PROFINET通讯)。
抓取机构由抓手气缸、升降气缸等组成,可完成货物的抓取、上下移动等功能。
2.4.6带式传输机构1
由平行带、交流电机、G120 PN标准变频驱动控制系统、同步带张紧装置、动力驱动装置、型材基体等组成。
西门子G120 PN标准变频驱动控制系统具体包括:
SINAMICS G120 控制单元 CU250-2 PN,内置ProfiNET通讯口,支持矢量控制,可通过 EPos 功能执行定位任务,4个可组态的IO点,6 DI(可作3 F-DI),5 DI,3 DO(可作1 F-DO),2 AI,2 AO 安全集成 STO,SBC、SS1安全功能可通过安全授权扩展,编码器:D - CLIQ + HTL/TTL/SSI,旋转变压器/HTL通过端子接入保护等级 IP20,提供USB及SD/MMC接口;
SINAMICS G120 智能操作面板;
SINAMICS G120 0.75KW 功率单元 PM240-2 带制动斩波器, 3AC 380-480V +10%/-10% 47-63 HZ。
2.4.7带式传输机构2
带式传输机构2含1条同步带(宽度30mm)、1条90XL 037同步带、2个14XL 037(%6 带扁)同步轮、1台直流电机(DC24V)、1套直流电机连接架、1套同步带张紧装置、1套动力驱动装置、1套带式传输机构支架。
2.4.8推料装置
推料装置含1套SMC推料气缸、2个调速快接头(90°弯头)、1套推料气缸支架、1个推出装置。
推料装置能够把物料从带式传输机构1推送至带式传输机构2。
推料装置配备1套物料检测传感器、1个传感器支架。
2.4.9智能预诊断模块
通过传感器对电机的振动与温度的动态检测,经过计算分析得出电机使用寿命和异常情况识别,可提前预知电机故障,提示进行设备保养与维护,实现故障的预诊断。主要参数如下:
 ① 外形尺寸:长方形;
① 外形尺寸:长方形;
② 设备类型传感器;
③ 输入输出串行(Modbus);
④ 输入详细信息振动/温度;
⑤ 电源直流10至30 V;
⑥ 环境等级(IP)IP67;
⑦ 环境评级(NEMA)NEMA 6P;
⑧ zui高温度工作条件105;
⑨ 最低温度运行条件-40;
⑩ 特点:危险区域没有;
⑪ 应用:温度输入是;
⑫ 应用:振动传感器输入是;
⑬ Modbus RTU:是;
⑭ RS-485:是。
2.4.10智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
2.4.11气路控制装置
含电磁阀、电磁阀快接头。
2.5温度控制教学实训平台
温度控制教学实训平台由PLC、移动型材工作台、控制屏、加热炉、带式传输机构、智能接口单元及控制面板等组成。

2.5.1 PLC控制器
1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米。
2.5.2移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:560mm×780mm,工作台高度:750mm。
2.5.3不锈钢网孔板
含不锈钢网孔板((435x584mm))、西门子空气开关1P10A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.5.4加热炉
由炉体、温度控制模块、型材支架等组成。
炉体(带通风孔)外形尺寸:340*270*370mm。
温度控制模块由1个变送器(输出:DC 0-10V、电源:DC 24V、精度:0.2%FS、量程:0-100℃)、1个功率模块、1个散热片、1个PT100温度传感器(温度系数:TCR=3850ppm/K;温度范围:0~150°C测量电流:PT100 0.3-最大1.0mA)、1个加热器、1个线路板组成。
2.5.5带式传输机构
含1条同步带(宽度30mm)、1条90XL 037同步带、2个14XL 037(6% 带扁)同步轮、1台直流电机(DC24V)、1套直流电机连接架、1套动力驱动装置、1套带式传输装置支架。
2.5.6触摸屏单元
采用西门子KTP700工业彩色触摸屏。
KTP700基本型彩色触摸屏,带键盘和触摸操作,7寸液晶显示,65536色,PROFINET通讯接口。
2.5.7智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
2.6自动化仓库教学实训平台
自动化仓库教学实训平台由PLC、移动型材工作台、控制屏、KUKA工业机器人单元、立体仓库主体、交换机、智能接口单元及控制面板、气路控制装置等组成。

2.6.1 PLC控制器
1个西门子CPU 1215C DC/DC/DC,2个 PROFINET通讯口,集成输入/输出: 14 DI 24V直流输入,10 DQ 晶体管输出24 V 直流, 2 AI 模拟量输入 0 - 10V DC ,2 AQ 模拟量输出 0-20mA DC,供电:直流 DC 20.4 - 28.8 V ,可编程数据存储区:125KB;
1套正版西门子博途V16编程软件,单授权,软件及其文档,包含于DVD;
1根以太网电缆,长6米。
2.6.2移动型材工作台
含型材桌面及支架、4个带锁万向轮、型材端盖等。支撑工作台底车支架结构采用型材做框架支撑,周边采用§1.5mm厚的优质钢板做封板,表面静电喷漆处理。正面柜门为半透有机玻璃门板。
所有型材均采用T形槽内凹高强度铝合金型材(Ai Mg Si合金热挤压,采用阳极氧化处理),桌面型材规格:30×60mm。
移动型材工作台占地尺寸:860mm×780mm,工作台高度:750mm。
2.6.3不锈钢网孔板
含不锈钢网孔板(435x584mm)、西门子空气开关1P10A (带漏电保护)、西门子电源模块(输入:120/230V AC,输出:24V DC/ 3A)、接线插排、线槽若干、电线若干。PLC安装在控制屏上。
配有空气开关安全隔离及电源模块安全隔离,采用全透明安装隔离板。
2.6.4 KUKA工业机器人单元
 工业机器人单元由KUKA工业六轴机器人本体、KRC4 Compact紧凑型控制柜和smart PAD示教器、机器人安装底座、机器人夹具等组成。
工业机器人单元由KUKA工业六轴机器人本体、KRC4 Compact紧凑型控制柜和smart PAD示教器、机器人安装底座、机器人夹具等组成。
(1)工业机器人本体
①轴数6轴;
②最大工作范围706.7mm;
③最大负载6kg;
④重复定位精度:±0.03 mm;
⑤机器人本体防护等级:IP 54;
⑥各个轴的运动范围(软件限位):轴1:+/-170°、轴2:+45° to -190°、轴3:+156° to -120°、轴4:+/-185°、轴5:+/-120°、轴6:+/-350°;
⑦各轴运动速度:轴1:360 °/s、轴2:300 °/s、轴3:360 °/s、轴4:381 °/s、轴5:388 °/s、轴6:615 °/s。
(2)KUKA KRC4 Compact机器人控制柜
①安装的伺服轴数量:1-6个;
 ②防护等级:IP 20;
②防护等级:IP 20;
③额定供电电压:1×208 to 230V AC;
④频率:49…61 Hz;
⑤控制柜尺寸(高、宽、长):460×483×271mm;
⑥支持PROFINET通信。
 (3)KUKA smart PAD示教器
(3)KUKA smart PAD示教器
①显示屏:触摸彩色显示屏,600 x 800像素;
②显示屏尺寸8.4"。
(4)1套机器人随机配套资料
(5)机器人安装底座
机器人底座采用Q235碳钢板材固定,底座整体拼焊而成;表面特殊处理;上下表面平行度满足机器人安装精度要求。
机器人底座支持机器人任意位置安装。
2.6.5机器人夹具
机器人夹具主要由机器人本体法兰安装母体工装、工具侧工装、平行夹、夹爪工具等组成,用于物料的搬运抓取工作。
2.6.6立体仓库主体
由仓位库体、气动夹手等部分组成,立体仓库为3层仓库(15库位)。
2.6.7平面轨迹单元
由铝材质安装底座、铝材质支撑立板、铝材质平板以及镂空模块组成,轨迹平台可自由调整倾斜角度,镂空模块应包含长方形及三角形等平面直线、圆形及椭圆形等圆弧、二次曲线等组成。可在水平面辅助机器人完成直线、曲线等轨迹的行走运动。
2.6.8气路控制装置
由带有可调压的二联体以及电磁阀组等组成。
2.6.9交换机
采用8口工业以太网千兆交换机。
2.6.10智能接口单元及控制面板
含智能控制模块、接线端子、绿色指示灯、红色指示灯、25针连接电缆、金属喷涂控制面板(含1个红色指示灯、1个绿色指示灯、1个双位旋钮开关、1个急停开关、3个红色按钮、3个绿色按钮等西门子低压器件)。
三、 平台实训内容
3.1 PLC程序设计训练
(1) S71200PLC控制技术
(2) 博图软件应用
(3) PLC指令训练
(4) PLC数字量、模拟量控制训练
(5) PLC控制多种电机训练
(6) PLC控制变频器训练
(7) PLC采集多种传感器信号训练
(8) PLC控制气动装置训练
(9) PLC网络训练
3.2气动控制系统
(1) 了解气压传动系统的组成
(2) 气源装置以及气缸、阀门的使用和学习
(3) PLC程序控制气动装置自动启动和停止
3.3传感器技术及应用
(1) 光电传感器应用
(2) 霍尔传感器应用
(3) 颜色传感器应用
(4) 电容传感器应用
(5) 电感传感器应用
(6) 温度传感器应用
(7) 接近开关应用
3.4直流电机控制技术
(1) 直流电机启停控制训练
(2) 直流电机正反转控制训练
3.5步进电机控制技术
(1) 步进电机细分的参数设置训练
(2) 步进电机的电流参数设置训练
(3) 步进电机往复运行控制训练
(4) 步进电机的位置控制训练
(5) 步进电机的速度控制训练
(6) 步进电机的启停控制训练
3.6伺服电机控制技术
(1) 伺服电机参数设置训练
(2) 伺服电机硬件连接训练
(3) 伺服电机位置控制往复运行训练
(4) 伺服电机位置控制速度改变训练
(5) 伺服电机位置控制精准定位训练
(6) 伺服电机速度控制往复运行训练
(7) 伺服电机速度控制速度控制训练
(8) 伺服电机转矩控制训练
(9) 伺服电机反馈信号采集训练
(10) 伺服电机回原点模式训练
3.7交流电机变频调速训练
(1) PLC控制变频器训练
(2) 变频器的参数设置训练
(3) 变频器的多级速运行训练
(4) 触摸屏的组态方法
(5) 触摸屏变量的添加
(6) 触摸屏连接方式的组态
(7) 触摸屏报警的组态
(8) 触摸屏开关按钮的组态
(9) 触摸屏指示灯的组态
(10) 触摸屏I/O域的组态
3.8 PID控制技术
3.9二轴运动控制技术
3.10工业网络训练技术
3.11机器人基本功能实训
(1) 机器人在工业领域中的应用
(2) 机器人机械结构及工作原理认知
(3) 机器人的配线连接设置
(4) 机器人手动控制及基本参数设置
(5) 机器人本体与控制器之间的电气连接与调试技术
(6) 机器人控制柜功能学习
(7) 机器人基本控制指令实训
(8) 机器人示教器功能学习
(9) 机器人工件坐标系参数标定及多坐标系切换
(10) 编程控制机器人的简单动作实训
(11) 编程控制机器人多轴联动实训
(12) 机器人复杂运动编程指令实训:
1) 转轴运动指令实训
2) 输入输出群指令实训
3) 输入信号指令实训
4) 通讯指令实训
5) 程序流程指令实训
6) 程序运行停止指令实训
7) 速度控制指令实训
8) 等待指令实训
9) 赋值指令实训
10) 负载定义指令实训
四、 平台整体规格参数
(1)电源:三相(380V±10% 50Hz)
(2)功率:≤3kVA
(3)工作温度:5℃~45℃
(4)工作湿度:30%~85%(无冷凝)
(5)气源气压:0.4-0.6Mpa
(6)系统外形尺寸:3660×780×1400mm(L×W×H)
X
截屏,微信识别二维码
微信号:13817525788
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!
