过程控制系统水箱液位与电动阀支路流量串级控制实验
水箱液位与电动阀支路流量串级控制实验
一、实验目的
1.熟悉液位-流量串级控制系统的结构与组成。
2.掌握液位-流量串级控制系统的投运与参数整定方法。
3.研究阶跃扰动分别作用于副对象和主对象时对系统主变量的影响。
4.主、副控制器参数的改变对系统性能的影响。
二、实验设备
1.过程控制综合实验装置—DDC控制模块
2.计算机及MCGS组态软件—DDC控制实验_ModBusRTU.MCG
3.实验专用线若干及RS485转232通讯线一根。
三、实验原理
本实验采用计算机控制,将上水箱液位控制在设定高度。串级回路是由内反馈组成的双环控制系统,属于复杂控制范畴。在计算机中设置了两个虚拟控制器作为主副控制器。将上水箱的液位信号输出作为主控制器输入,主控制器的输出作为副控制器的输入,在串级控制系统中,两个控制器任务不同,因此要选择控制器的不同调节规律进行控制,副控制器主要任务是快速动作,迅速抵制进入副回路的扰动,至于副回路的调节不要求一定是无静差。主控制器的任务是准确保持下水箱液位在设定值,因此,主控制器采用PI控制器也可考虑采用PID控制器。 液位-流量串级控制系统的方块原理图如图4.7所示。
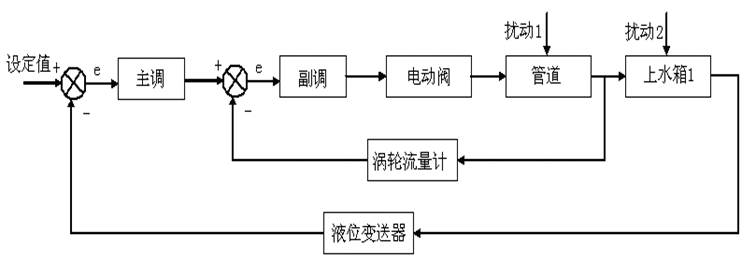
图4.7 液位-流量串级控制系统原理图
四、实验步骤与内容
1.了解实验装置中的对象,流程图如图4.8所示。

图4.8 液位-流量串级控制系统流程图
2. 按如下要求接好实验导线和通讯线。
使用485转232通讯线将控制台侧边DDC通讯口 “COM1” 与上位机连接。
在传感器信号输出区域,将流量计1信号 FT1信号用实验线连接到DDC控制模块的AI0信号输入端,将上水箱液位信号LT1用实验线连接到DDC控制模块的AI1信号输入端,正负一一对应。
将DDC控制模块输出信号AO0连接到执行器控制信号输入区的电动调节阀控制信号端口,正负一一对应。
3.将手动阀门1V1全开,V3、V4打开,将手动阀门1V2关闭。
4.先打开控制台左侧的总电源开关,按“Start”按钮启动设备,再打开DDC电源开关。
5.运行计算机上的 DDC控制实验_ModBusRTU.MCG工程,选择“系统管理”下拉菜单中的“用户登录”,出现如下界面。

图4.10 用户登录界面
6.点击“确认”,用户登录完毕。选择“串级控制实验”下拉菜单中的“上水箱液位与电动阀支路流量串级控制实验”,出现如下的“上水箱液位与电动阀支路流量串级控制实验”界面。

图4.11上水箱液位与电动阀支路流量串级控制实验界面
7.点击“参数设置”,出现如下界面。

图4.12 参数设置界面
8.将AI0设置为0 – 1200,AI1设置为0-30点击退出,参数设置完毕。
9.调节器参数设置。
Ts=1 (参考值) SV=8 (参考值)
Kc1=0.02 (参考值) Ti1=5(参考值) Td1=0 (参考值)
Kc2=8 (参考值) Ti2=65 (参考值) Td2=0 (参考值)
10.选择计算机控制方式, 在控制台上打开水泵、电动调节阀电源。
11.观察计算机上的实时曲线和历史曲线。
12.待系统稳定后,给定加个阶跃信号,观察其液位变化曲线。
13.再等系统稳定后,给系统加个干扰信号,观察液位变化曲线。
14.实验结束后,关闭水泵1、电动调节阀,拆除试验线。
五、实验报告要求
1.写出常规实验报告,画出液位-流量串级控制系统的结构框图。
2.用实验方法整定控制器的相关参数,写出整定过程。
3.根据扰动分别作用于主、副对象时系统输出的响应曲线,分析系统在阶跃扰动作用下的静、动态性能。
4.分析主、副控制器采用不同PID参数时对本实验系统性能的影响。
六、思考题
1.为什么副回路的控制器用P控制,而不采用PI控制规律?
X
截屏,微信识别二维码
微信号:13817525788
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!
