


| 序号 | 产品名称 | 规格参数 |
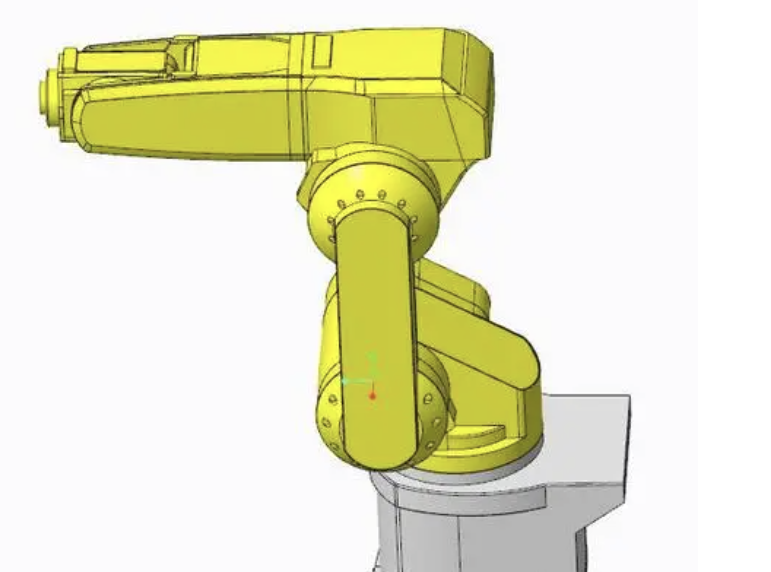
| 1 | 轻量化拆装机器人 |
手腕负载:额定3kg最大4kg 最大工作半径:540mm 自由度:6 关节速度: J1 370°/s J2 370°/s J3 430°/s J4 300°/s J5 460°/s J6 600°/s 关节范围: J1±170° J2±110° J3+40°/220° J4±185° J5±125° J6±360° 重量:≤25kg 工作温度:0-40℃ 本体全透明化设计,可直接观察到内部各个部件的运动过程及原理。 |
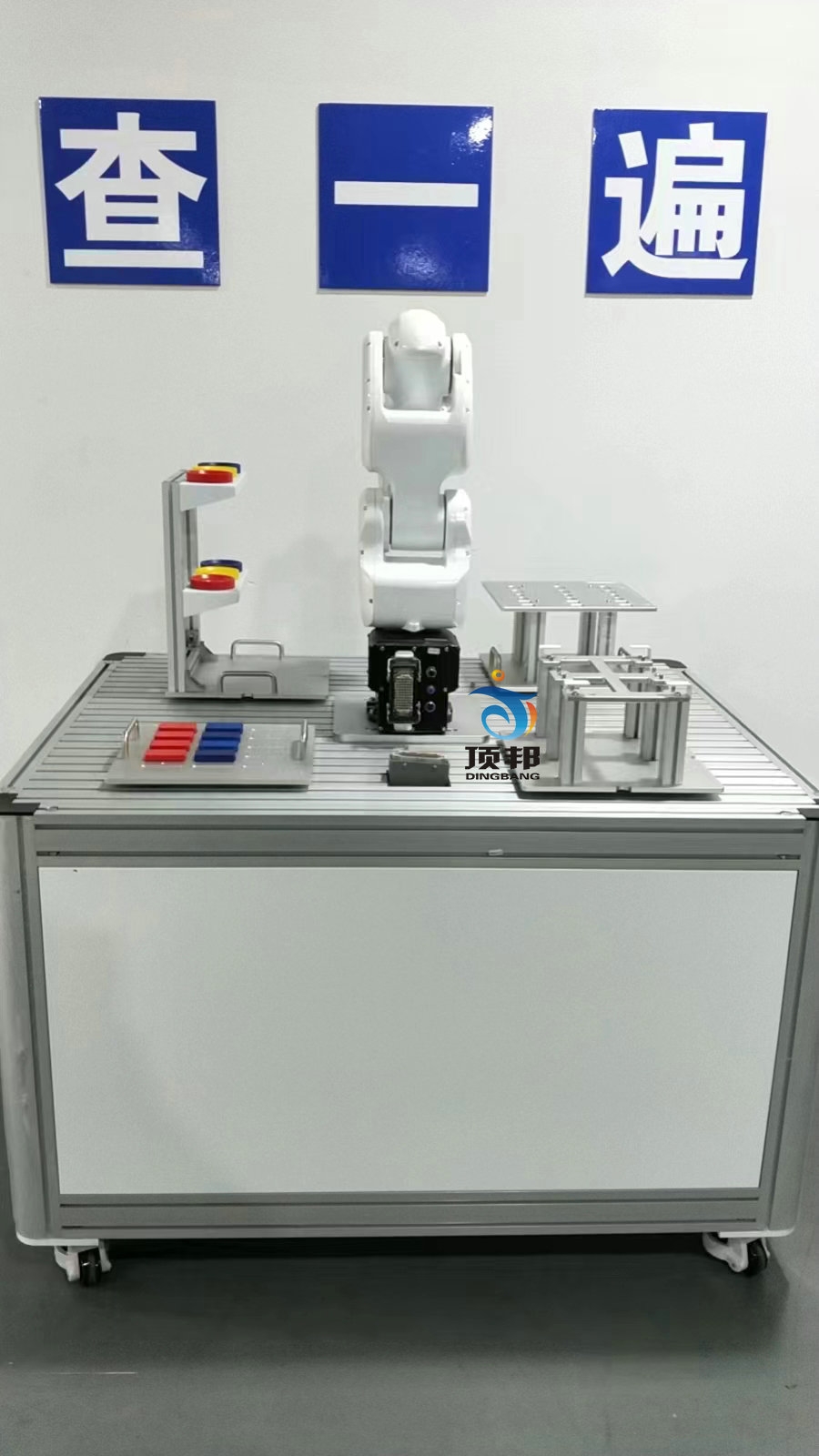
| 2 | 拆装实训台 | 防静电拆装一体化实训台主体由铝型材焊接而成,两侧安装喷塑钢板,下方配置推拉式抽屉,用于放置机器人拆装工具,整体结构牢固美观,便于机器人的拆装维护及示教编程作业。防静电拆装一体化实训台尺寸:≥1250*1000*820 mm。 |
| 3 | 机器人控制系统 |
采用EtherCAT总线技术,兼容IEC61131-3标准,支持各类EtherCAT模块;基于X86 IPC+RTOS设计,支持六关节自由度机器人、SCARA机器人、五轴机器人、连杆码垛机机器人、四轴多关节机器人、DELTA机器人、直角坐标机器人、多轴专用机器人等多种机器人的控制。 自带上下料、码垛、焊接、焊缝跟踪、视觉、激光切割、传送带跟踪、碰撞检测、拖拽示教等多种通用工艺,并可根据用户需求进行定制;同时提供完整API接口,用户可根据需求高效、方便地自主开发专用工艺(PApp)与专用工艺界面(PUI)。 控制器:处理器:X86 4核 2.0G 内存:4G 存储空间:16/32G 控制轴数:标准:6轴垂直关节机器人 可选配:1轴地轨、2轴辅助轴变位机、3轴龙门架 控制伺服:EtherCAT,Sercos III,CANopen,TSN 接口:数字I/C接口,16路输入/16位输出(可扩展) 4路-10~+10V模拟量输出,12位精度(选配,可扩展) 8路-5~+5或0~10V模拟量采集,12位精度(选配,可扩展) 机器人专用端子接口,防碰撞、电机报闸,报警控制等 操作模式:示教模式、离线编程、远程模式 编程方式:示教编程、离线编程、拖动示教 运动功能:点到点、圆弧、样条曲线、直线横摆、轨迹平滑 指令系统:运动指令、逻辑指令、输入输出指令、运算指令 位置控制方式:点到点控制、连续轨迹控制 坐标系统:关节坐标系、机器人坐标系、工具坐标系、用户坐标系 结构算法:4轴SCARA 4轴冲压机械手 6轴垂直多关节 4轴连杆码垛 4轴直角坐标机器人 客制化专用机器人 应用:装配、点胶、焊接、喷涂、码垛、切割、抛光打磨、搬运等 电源:24V 60W(控制器功率30W,示教盒30W) |
| 4 | 工业机器人快换组件 |
外形尺寸(长×宽×高) 300*300*200 mm 工位数量 2个 铝材支架主要由铝型材搭建而成,其表面配套定位装置。工件放置在实验支架的定位装置中,机器人示教再现进行样件的搬运作业。铝材支架上面固定四处尖针,以便进行TCP标定验证。 机器人末端配置气动手爪工具,用于夹取样件进行搬运、装配、编程、实操等实训作业。 |
| 5 | 码垛模块 |
外形尺寸 (长×宽×高) 300*300*60 mm 安装形式 适配标准实训台定位安装 零件容量 矩形工件15个。 |
| 6 | 装配模块 |
外形尺寸:(长×宽×高)300*300*178mm 安装形式 适配标准实训台定位安装 可容纳零件个数18个 排列形式 3行6列 装配模块设置有装配顺序,可拓展RFID功能。 |
| 7 | 立体仓库模块 |
外形尺寸(长×宽×高) 300*300*420 mm 安装形式 适配标准实训台定位安装 仓储容量 6 兼容工件种类 2种 |

