
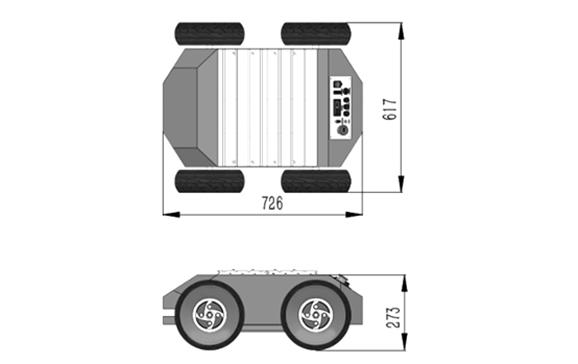

| 无人车平台 |
尺寸 726*617*273mm 轮距 535mm 轴距 386mm 净重 40kg 负载 50kg 电机数量 2个 电池 24v 磷酸铁锂电池 电池容量 20Ah 续航时间 4h 辅助电源 24v 最大速度 0.8m/s 驱动方式 四驱 转向方式 差速转向 垂直越障能力 8cm 爬坡能力 25° |
| 工控机 |
算力 100TOPS GPU 32个Tensor核心1024核 CPU 8核Arm Cortex-A78 2GHz 内存 16GB 128位LPDDR5 102.4GB/s 存储 512GB 视频编解码 H.265 PCIe 1X4+3X1 PCIe4.0 显示接口 HDMI2. 1 1x8K30DP 网卡 内置 I/O USB3.0/SCI/I2C/CAN/DMIC/ DSPK/I2S/GPIOs |
| 显示器 |
尺寸 13.3 英寸 比例 16: 9 分辨率 1920*1080 亮度 300 cd/m² 对比度 800: 1 触摸 否 |
| 多线雷达 |
线数 16 激光波长 905nm 激光安全等级 Class 1 人眼安全 测距能力 150m(90m@10% NIST) 盲区 ≤0.2m 精度(典型值) ±2cm(1m to 100m) ±3cm(0.1m to 1m) ±3cm(100m to 150m) 水平视场角 360° 垂直视场角 30°(-15°~+15°) 水平角分辨率 0.2°/0.4° 垂直角分辨率 均匀 2° 帧率 10Hz/20 Hz 转速 600/1200rpm (10/20Hz) 出点数 ~288,000pts/s(单回波) ~576,000pts/s(双回波) UDP数据包内容 三维空间坐标 反射强度 时间戳等 输出数据协议 UDP packets over Ethernet 时间同步 ≈ GPRMC with 1PPS,PTP&gPTP |
| 卫星接收机 |
通道 1408 通道 频点 5星多频 BDS、GPS、QZSS、GLONASS、Galileo 单点定位 (RMS) 平面 1.5m 高程 2.5m RTK(RMS) 平面 0.8cm+1ppm ;高程 1.5cm+1ppm 冷启动 <30s RTK 初始化时间 <5s( 典型值 ) 初始化可靠性 >99.9% 差分通讯方式 免DTU模块 差分数据 RTCM 3.X 数据格式 NMEA 0183 Unicore 定位测向数据更新率 20Hz 原始观测量数据更新率 20Hz 定向精度 (RMS) 0.1° /1m 基线 时间精度 (RMS) 20ns 速度精度 (RMS) 0.03m/s 双天线接口 SMA公头外螺内孔 * 2 通讯接口 USB-Type-C 供电接口 USB-Type-C/XT-30 供电电压 5-15V 功耗 2.4W 尺寸 93mmx69mmx37mm 重量 153g |
| 惯性导航系统 | 方位角测量范围:±180°(陀螺与磁方位可选)、测量精度(RMS)@25℃:<1.5°(无磁干扰条件下)、分辨率:<0.1° 、倾角测量范围:±500°/sec、测量精度(RMS)@25℃:<±0.5 °(动态)、<±0.2 °(静态)、分辨率:<0.1° 、陀螺仪测量范围:±180°(陀螺与磁方位可选)、零点偏差稳定性@25℃:<200 °/hr、分辨率:<0.1°/sec、宽带:>100Hz 、加速度计测量范围:±8G、分辨率:<10mg、宽带:>100Hz 、磁场计测量范围:±8gauss、分辨率:<2.5mgauss、宽带:14-17Hz |
| 高清相机 | 分辨率帧率 1920X1080, 30fps |
| 双目相机 |
视频输出:>2.2K@15fps,>1080p@30fps;>720p@60fps, 视野:>90°(H)x60°(V)x100°(D) RGB传感器类型;>1/3”4MP CMOS; 焦距:>2 . 8mm; 接口:USB 3.0端口; 深度范围:0.5-20m; 深度精度, <2%up to 3m;≤4%up to 15m; |
| 软件功能 |
功能: 键盘/手柄控制机器人运动; Cartographer2D/3D-SLAM建图/定位;。 Navigation导航包; TEB机器人局部路径规划器; 全局路径规划器: 多点路径导航包; RTK定位融合算法包; GPS循迹路径导航包; Simulation仿真模拟器 |

