
| 可达半径(MM) | 550 | |
| 安装方式 | 地面安装、顶吊安装、倾斜角安装 | |
| 手腕允许负载转矩 | J4 | 8.86Nm |
| J5 | 8.86Nm | |
| J6 | 4.9Nm | |
| 手腕允许负载转动惯量 | J4 | 0 .20kg x m² |
| J5 | 0 .20 kg x m² | |
| J6 | 0 .067 kg x m²/ | |
| 运行角度/速度 | J1 | +/- 340°(可选360°)(460°/s) |
| J2 | +/- 230°(460°/s) | |
| J3 | +/- 402°(520°/s) | |
| J4 | +/- 380°(560°/s) | |
| J5 | +/- 240°(560°/s) | |
| J6 | +/- 720°(900°/s) | |
| 手腕部可搬运质量 | 4KG | |
| 重复定位精度 | +/-0.02mm | |
| 本体重量 | 20kg | |
| 序号 | 名称 | 型号及规格 | 单位 | 数量 |
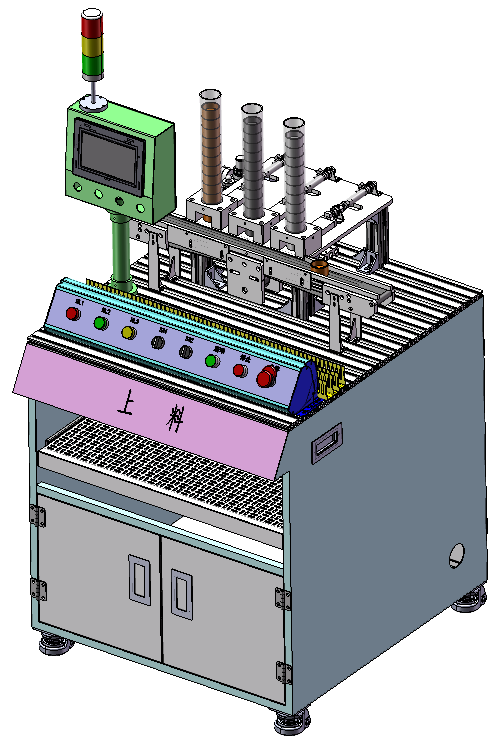
| 1 | 供料单元 | >75×78×110cm | 套 | 1 |
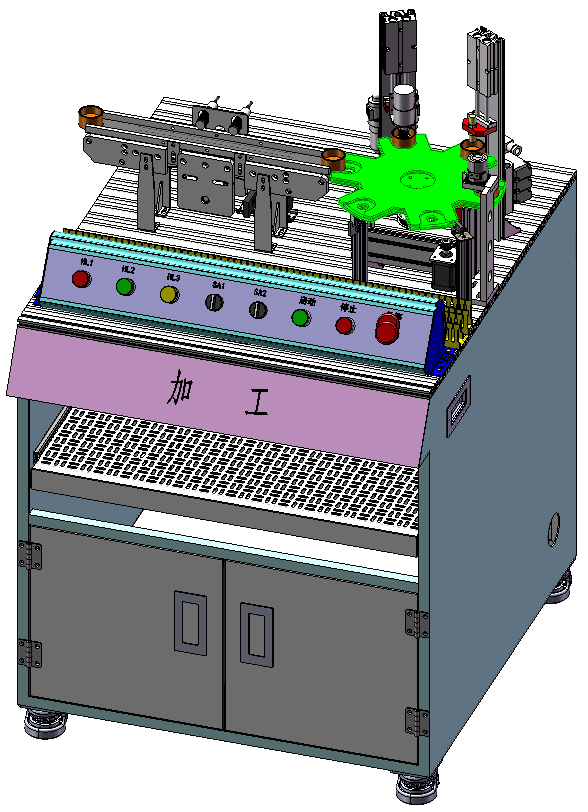
| 2 | 加工单元 | >75×78×110cm | 套 | 1 |
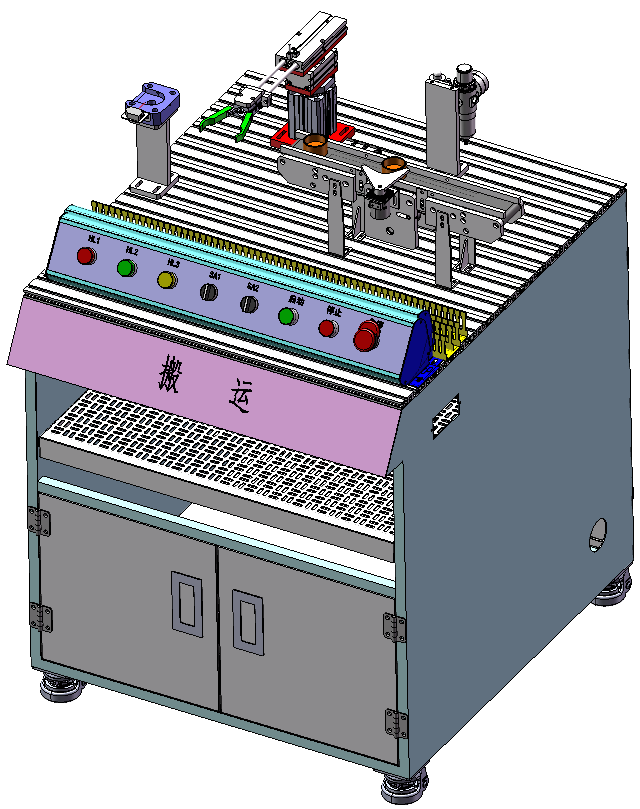
| 3 | 搬运单元 | >75×78×110cm | 套 | 1 |
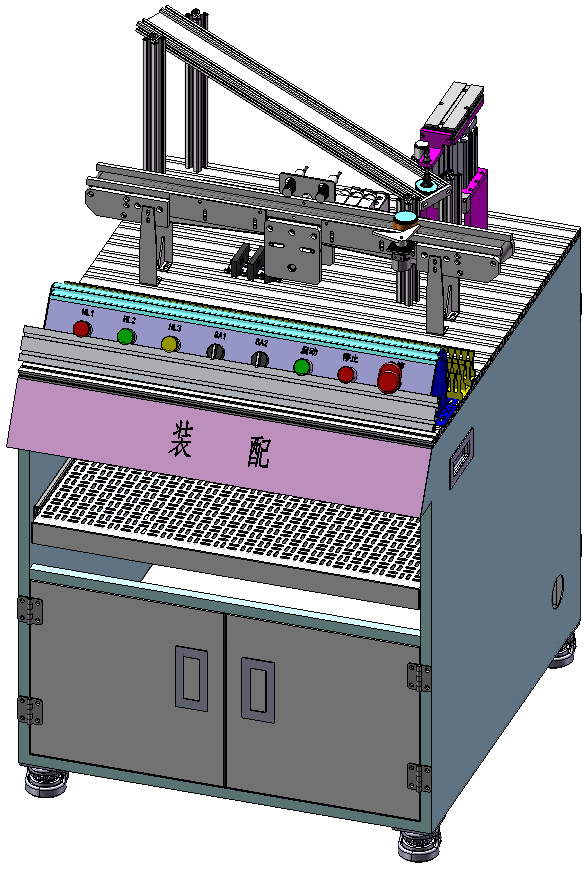
| 4 | 装配单元 | >75×78×110cm | 套 | 1 |
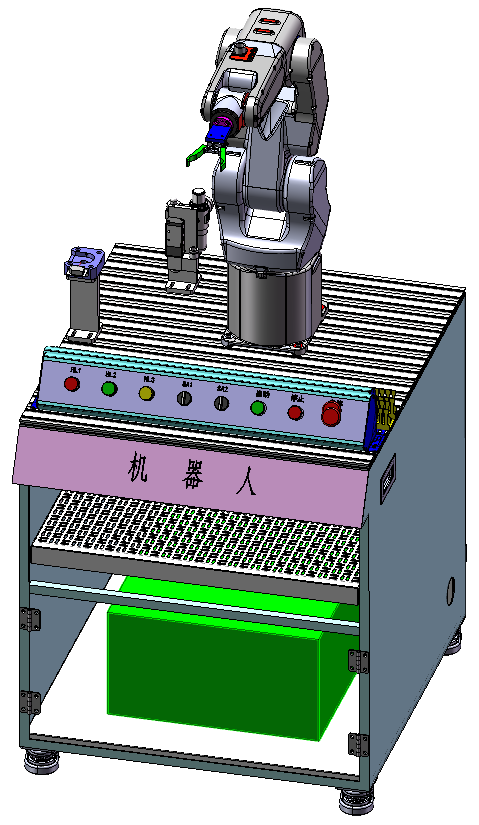
| 5 | 机器人搬运单元 | >75×78×110cm | 套 | 1 |
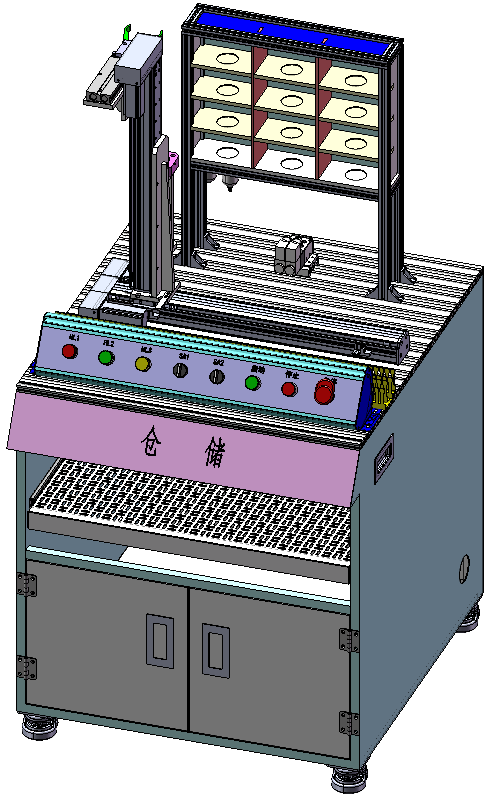
| 6 | 仓储单元 | >75×78×110cm | 套 | 1 |
| 7 | 运输单元 | 套 | 1 | |
| 8 | 触摸屏监控单元 | 套 | 1 | |
| 9 | 配套常用工具 | 套 | 1 | |
| 10 | 静音气泵 | >500W | 套 | 1 |
| 11 | 机器人3D仿真软件 | 套 | 1 | |
| 12 | 自动化生产线3D仿真软件 | 套 | 1 | |
| 13 | PLC3D仿真软件 | 套 | 1 | |
| 14 | 铝合金电脑推车 | 电脑用户自备 | 套 |
1 |

