
| 序号 | 名称 | 参数 | 序号 | 名称 | 参数 |
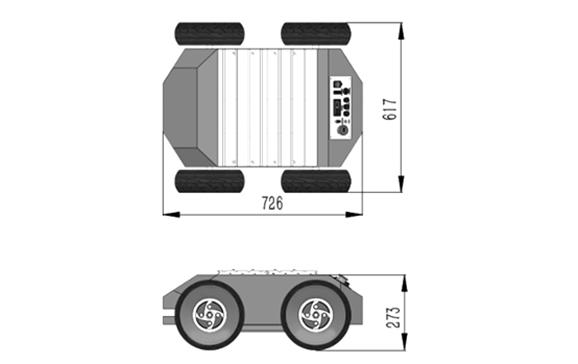
| 1 | 尺寸(长*宽*高) | 726*617*273mm | 13 | 驱动方式 | 4驱 |
| 2 | 轮距 | 535mm | 14 | 转向方式 | 差速转向 |
| 3 | 轴距 | 386mm | 15 | 控制板 | Stm32 |
| 4 | 净重 | 40kg | 16 | 通信接⼝ | USB串口 |
| 5 | 负载 | 直线50kg | 17 | 编码器精度 | 400线 |
| 6 | 电机数量 | 2 | 18 | PID控制频率 | 50Hz |
| 7 | 电机功率 | 24V250W | 19 | 适用地形 | 全地形 |
| 8 | 轮胎 | 10寸充气轮胎 | 20 | 垂直越障能力 | 8cm |
| 9 | 电池 | 24V DC磷酸铁锂电池 | 21 | 爬坡能力 | 25° |
| 10 | 续航时间 | 4小时 | 22 | 手柄控制 | 最大20m |
| 11 | 辅助电源 | 3*12V DC口 1*5V usb口 | 23 | 手柄通信 | 2.4Ghz |
| 12 | 最⼤速度 | 0.8m/s |
| 序号 | 传感器名称 | 数量 | |
| 1 | Mini计算机 |
CPU AMD® Ryzen3 3200G 芯片组 AMD® A300 内存 DDR4 8GB 硬盘 NVMe 250GB 系统 OS系统 键盘/手柄控制机器人运动 joystick_drivers短距离控制 Cartographer 2D SLAM建图/定位teb_local_planer 多点导航 基于弹性带理论机器人局部路径规划 循环循迹全局规划器 Simulation 仿真模拟器 |
1 |
| 2 | 电源组件 |
电池 :24V DC磷酸铁锂电池 电池容量 16AH @ 24V 输入/输出 24V x 10A / 12V x 20A 输出口数量 5个XT30(并联) 纹波电压 < 100mV |
1 |
| 3 | 显示器 |
尺寸 13.3 英寸1080P HDR 前后单线激光雷达 测量距离 0.15-10 m @ 10% 角度分辨率 0.36 ° 扫描速度 15 Hz 重复精度 ±3 cm 距离分辨率 1 cm |
1 |
| 4 | 深度相机 |
尺寸 103mmx33mmx22mm 传感器 ToF CCD+RGB 激光发射器 940nm VCSEL ToF分辨率帧率 640X480, Max.30fps RGB分辨率帧率 1920X1080, 30fps ToF FOV 69°(H) × 51°(V) RGB FOV 73°(H) × 42°(V) 输出格式 RAW12(深度,IR), MJPEG(RGB) 检测距离 0.35m~4.4m 工作温度 -10℃~50℃ |
1 |
| 5 | 多线激光雷达(RS-lidar-16) |
线束16线 波长905nm 激光等级class1 精度±2cm(典型值) 测距20cm-150m(目标反射率20%) 出点数320,000pts/s 垂直视场角+15°~-15° 垂直角分辨率2.0° 水平视场角360° 水平角分辨率0.09°至0.36°(5-20Hz) 转速300-1200rmp(5-20Hz) 采集数据三维空间坐标、反射率 |
1 |
| 6 | 惯导(AH200C) |
方位角测量范围:±180°(陀螺与磁方位可选) 测量精度(RMS)@25℃:<1.5°(无磁干扰条件下) 分辨率:<0.1° 倾角测量范围:±500°/sec 测量精度(RMS)@25℃:<±0.5 °(动态)、<±0.2 °(静态) 分辨率:<0.1° 陀螺仪测量范围:±180°(陀螺与磁方位可选) 零点偏差稳定性@25℃:<200 °/hr 分辨率:<0.1°/sec 宽带:>100Hz 加速度计测量范围:±8G 分辨率:<10mg 宽带:>100Hz 磁场计测量范围:±8gauss 分辨率:<2.5mgauss 宽带:14-17Hz |
1 |


