智能工业机器人实训平台,机器人实验平台
一、技术性能
1、输入电源:单相三线~220V±10% 50Hz
2、工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3、装置容量:<1.5kVA
4、实训平台尺寸:2300mm×1200mm×800mm,各部件采用优质铝合金和不锈钢机加工成型,精度高,外观无划痕等。
5、控制柜尺寸(机器人):540mm×410mm×800mm
6、安全保护:具有漏电保护,安全符合国家标准
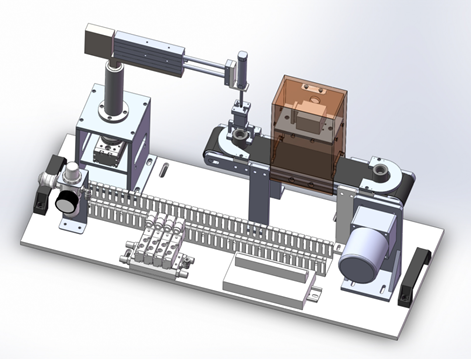
二、设备结构与组成
智能工业机器人实训平台采用ABB六自由度工业机器人系统、传送系统、可编程控制器(PLC)系统、视觉检验系统、分拣系统、供料单元、加工系统、装配系统、仓库单元、各类工件、电气控制柜、型材实训桌、型材电脑桌等组成。
1、六轴机器人(ABB)
6轴控制机械手:重量不大于25kg,最高荷重3kg,工作范围达580mm,能通过柔性(非刚性)自动化解决方案执行一系列作业,重复定位精度:0.01 mm,轴1旋转:工作范围+165°~ -165°,轴2手臂+110°~ -110°,轴3手臂+70°~ -90°,轴4手腕+160°~ -160°,轴5弯曲+120°~ -120°,轴6翻转+400°~ -400°。机器人高度:700 mm,机器人底座尺寸:180×180 mm。可就机器人使用寿命内,使用机器人离线软件进行实时程序,IO,机器人3D动态动作监控。远程机器人系统备份与恢复功能,自动工具重量与载荷检测设定功能,在示教器实现人机互动界面的开发,并提供基于VB和C#的二次开发功能,机器人全寿命保养自动维护检测系统功能,机器人运动轨迹实时微调功能,自带IO自定义可编程按钮,3D实时舒适摇杆手动操作系统,电池电量环保节省功能,终身机器人系统功能升级(高级用户),支持RAPID编程语言规范,并直接解释执行,支持ROBOTAPPS的开发,机器人控制系统软件必须基于WINCE平台,机器人控制系统原配固态存储器容量不得低于1G,并支持USB扩展为副存储器,机器人控制系统必须支持运行ROBOTWARE6.0以上的版本。
IRC5机械手控制柜:尺寸258*450*580mm,单相220V供电,控制软件RAPID,紧凑型,防护等级IP20
机器人示教器:重量1KG,彩色图形界面触摸屏,操作杆和紧急停止按钮,左右手操作支持,USB储存器支持。
配套:RW机器人操作系统,机器人与控制电缆7米,示教器与机器人电缆10米,机器人操作系统,碰撞检测软件,主从通信模块,16进16出数字输入输出板。

(参考图)
2、可编程控制器单元
配备可编程控制器、数字量扩展模块、以太网通信模块等,用于读写RFID系统的工件数据,控制机器人、电机、气缸等执行机构动作,处理各单元检测信号、数据传输等任务。
3、工位供料单元
模块尺寸400*400mm,由光电传感器、推料缸灯组成,具有出料工位提供物料,使得实验具有观赏性。
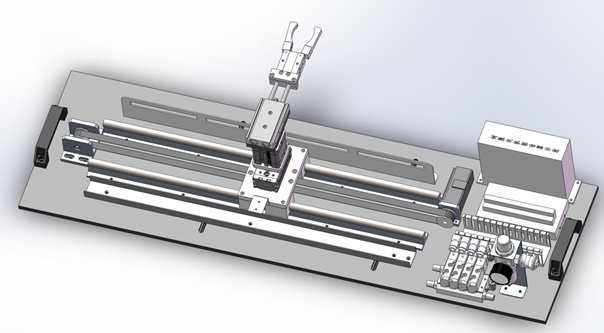
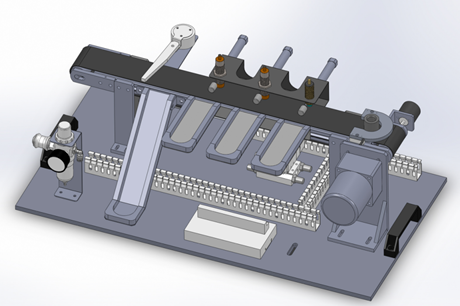
4、输送单元
模块尺寸1100*770mm,由直线执行器及搬运机械手组成,由多种气缸组成的机械手负责工件的抓取及摆放。直线执行器由伺服电机及同步带组成,负责带动机械手精确移动,从而实现将工件在各单元之间的精确搬运。可运动与不少于二个方向。
5、工件模拟加工单元
模块尺寸400*400mm,由旋转缸、加工缸及渐变彩灯等组成,系统需配有加工系统,有制作工艺的标准流程。加工时因具有加工提示。
6、装配单元
模块尺寸400*400mm,由旋转缸、加工缸及渐变彩灯等组成,需要有物料装配过程,能与原物料结合。装配时因具有装配提示。
7、视觉检测系统
模块尺寸780*300mm,配备传送带、视觉相机、光纤传感器、4轴机械手等,可识别物料的颜色及分辨产品是否合格,最后传送物料到分拣单元。
8、分拣单元
模块尺寸770*400mm,主要由铝合金型材基体、推料缸、光电传感器、颜色传感器、接近开关、光纤传感器等组成。采用单相电机完成运输功能,通过传感器,运输中通过PLC的运算对物料进行分拣工作。完成对毛坯件材质、颜色、高度的检测并将不合格工件检出。
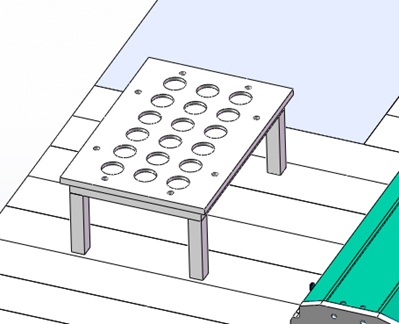
9、仓库单元
模块尺寸320*220mm,将分拣好的材料完成码垛存储的功能。
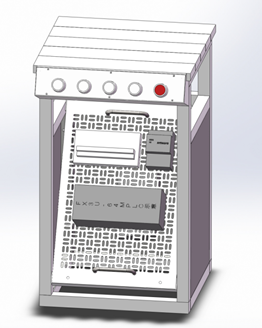
10、机器人电气控制柜
用于安装机器人控制器、PLC、变频器及调速控制器等电气部件,采用网孔板的结构,便于器件拆装、电气布局,增加了设备的实训性能。通过航空电缆线与型材实训桌相连,强弱电分离,连接安全可靠。
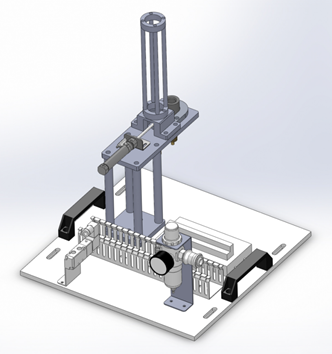
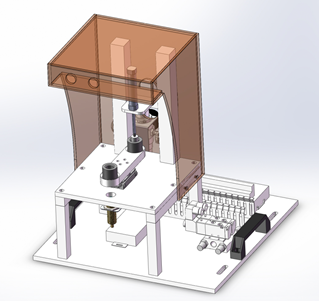
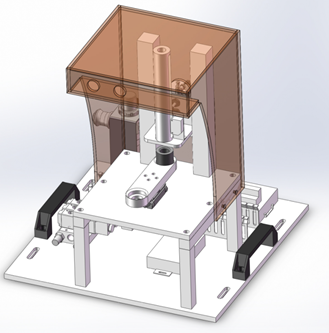
11、视觉识别系统
视觉识别机构由识别摄像头(要求灵敏度1.8V/lux-sec@550nm,分辨率2048×1536,光谱响应400nm~1000nm,帧率15fps @ 1600 x 1200/30 fps @ 800 x 600)、茶色亚克力遮光罩、LED补充光源等组成,配套视觉识别软件,对物料进行检验是否合格。
12、现代PLC电气先进控制云平台
本平台将物联网技术运用于将PLC信息并将数据上传至云平台,进行海量数据存储,并提供丰富的数据分析工具方便更加准确的掌握数据与分析数据。需现场演示,本平台可实现以下几个功能: 数据云系统上传,手机app数据查询,历史数据查询,数据分析统计,微信反向控制。
机器人控制原理系统平台:
(1)采用DS28335作为主芯片设计,3.5KW工业级驱动模块,配置制动器,位置传感器,伺服电机,具有转速控制,位置控制,采用LABVIEW等语言作为上位机控制系统,采用7寸彩色触摸屏显示,支持高级语言MATLAB开发平台,用户无需C语言及硬件知识,可专注算法研究。
(2)、A/D和D/A通道:除DSP本身所带的A/D通道外,还需额外扩展4路以上12位的D/A转换通道,可编程生成任意波形,输出电压范围最大为±10V。3)、外扩I/O:除DSP本身的I/O口外,需扩展多路光耦隔离输出口(6路以上)、多路光耦隔离输入口(6路以上)
(3)、人机界面:采用7寸以上彩色触摸屏,显示电机实时转速、频率,当前的日期、时间等。提供人机交换界面及上位机软件,实现启动、停止、频率调节、给定转速调节、PID调节等控制;同时上位机可实时观测电流、速度反馈等。
(4)、上位机软件:通过上位机可以实现启动、停止、频率调节、给定转速调节、PID参数设定等功能;同时可实时观测电流、速度反馈等波形。
(5)、通信接口:1个CAN接口,1个USB接口,1个10M/100M以太网接口,方便用户扩展。
(6)、功率模块:采用IPM模块,最大输出功率3.5kW。
(7)、保护功能:具有过压、过流与过热保护功能,当保护发生时立刻封锁PWM脉冲输出。
(8)、能提供源代码供学生实验时进行程序修改调试,并提供相关的实验指导书。开放部分PWM接口(6路以上)、I/O口、CAP口、AD、DA 等等外围电路接口,供不同实验扩展使用,即DSP板应该为开放可二次开发板。利用DSP仿真器将不同的控制算法下载到DSP芯片中,各种标准接口(SCI、JTAG等),显示模块,捕获脉冲产生单元,光码信号处理单元,电源,电机控制单元,电机驱动芯片以等,支持多种电机控制,支持24V系统和高压系统。
14.3D仿真系统:本系统采用三维设计,仿真度高,与设备1:1配套,全零件拆装,接线,程序运行仿真等,提供照片及实验(含各设备的联调)的演示,具有相关的原理图。
三、实验所需完成的实验项目
项目一 PLC程序编程与调试
项目二 工业机器人示教单元使用
项目三 工业机器人软件使用
项目四 工业机器人基本指令操作
项目五 工业机器人工件的跟踪抓取
项目六 工业机器人的动作编程应用
项目七、材料分拣的编程应用
项目八、整个系统的编程与应用
项目九、机器视觉识别系统
项目十、机器人控制系统原理底层开发
X
截屏,微信识别二维码
微信号:13817525788
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!