一、实验目的:
1、通过实际动手操作,将单一的机械零件进行搭接组合以实现机械传动中各种传动效果,使学生将所学的理论在实践中得到运用;
2、掌握实际安装中的零件加工精度对装配的影响,及装配工艺对传动装置传动效果的影响;3、展示传动部件不同组合对传动的影响;
4、掌握工作中各种工卡量具的使用;
5、通过对机械传动方案的装配,充分了解安装误差对机械传动工作过程所产生的各种损坏和振动噪声等。
二、实验内容:
1、机械传动系统认识;
2、机械传动测量技术
3、机械系统装配练习;
4、机械传动方案设计;
5、机械系统性能测试与分析;
6、典型装配方案:
1、V型带传动 11、曲柄摇杆机构
2、链传动 12、曲柄滑块机构(偏心和对心)
3、齿轮传动 13、皮带-曲柄摇杆机构
4、直齿齿轮传动 14、链传动—曲柄摇杆机构
5、斜齿轮传动 15、皮带—曲柄滑块机构
6、锥齿轮传动 16、链传动-曲柄滑块机构
7、复合齿轮传动 17、皮带传动-制动
8、皮带-齿轮传动 18、链传动-制动
9、链-齿轮传动 19、弹性联轴器-齿轮传动
10、多轴齿轮传动 20、刚性联轴器-齿轮传动
三、主要技术参数:
电机(2台): 61K250RA-CF 电压:220V 250W; 转速:0-1440rpm
51K60RGN-CF电压:220V 60W; 转速:0-300rpm
直线位移传感器(1个): 量程150mm;
光栅角位移传感器(1个): 脉冲数1000p;
量具:
游标卡尺:0-150mm;
外径千分尺:0-25mm;
百分表:0-10mm;
万能角尺:0-320度;
塞尺:0.02-1.0(17种);
高度尺:0-300mm;
数字转速表:
2.5~99,999转/分(RPM) 光电转速方式;
0.5~19,999RPM (转/分) 接触转速方式;
0.05~1,999.9m/min (米/分) 接触线速方式;
四、实验思想介绍:
1)机械动力传输安全:
目标1 描述机械动力传输的功能并提供一个有利条件
一个机械动力传输系统是由连接件、轴、齿轮、轴承或者其它构件组成的装置,用于传输和控制从一个设备到另一个设备的力和运动.提供动力的装置叫做驱动或者主动者,传输动力的装置叫做传输装置,如图1,在这个例子中,V带用来传输从电动机到空气压缩机的能量。
机械动力传输是动力传输的诸多方法中的一种,其余还有:
电力的,如电动机
热力的,如汽油机
流体的,如水压或者风力机
在大多数情况下,机械系统用于结合上述几种形式的能量。例如图1中,电动机通过旋转轴将电能转化为机械能。机械系统则传输能量到另一旋转轴去驱动压缩机,压缩机则将机械能转化为流体的能量。
这时你可能会问一个问题:为什么不直接将电动机直接连接到压缩机的轴上而去掉中间的机械系统?这是另一个可采取的途径,但是它实际上并没有去掉机械系统。它仅仅在形式上改变了。所以,带驱动系统代替直接连接系统。
不使用直接连接系统而使用复杂机械系统的原因包括:
1)提高或者降低速度:
2)提高或者降低力和力矩:
3)改变运动方向:
4)扩展能量传输到离驱动装置较远的地方:
5)改变运动的类型,从旋转到线性:
6)控制运动的加速、减速:
尽管以上的原因中大部分都能由控制者和驱动者来实现,但是利用机械系统来完成这些任务是因为其通常很便宜。好的机械设计能够极大的降低机器的费用。
目标2 描述旋转机械动力传输的五种方法并给出它们的应用。
机械动力能够通过线性或者旋转的方式来传输。旋转动力传输中 轴-轴 方式是目前最常见的。旋转动力传输大致分为以下两种,如图2所示:轴向的和轴-联轴器-轴-执行件传动

图2
轴向的轴传输.
通常有两种轴向动力传输:联轴器和离合器。如图3所示,连轴器将两个轴连接到一起。联轴器最常见的应用是将驱动装置连接到被驱动组件上,如一个电动机和一个泵。另一个应用是通过连接另一根轴从而扩展轴的长度。
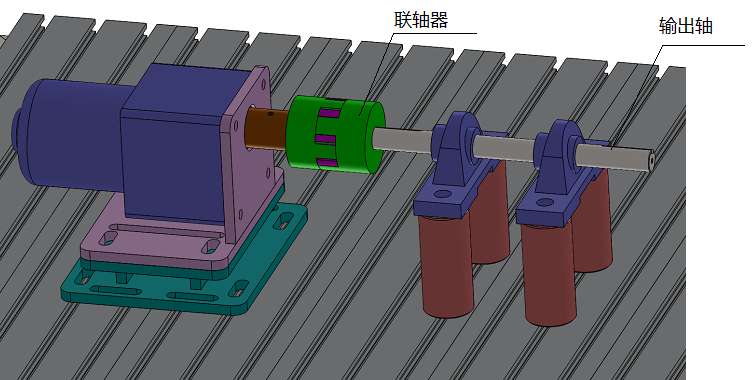
图3
离合器,像联轴器一样,连接两个轴到一起。不同之处在于采用离合器可以使得两个轴在旋转的时候彼此分离,一个常见的应用是过载。一个例子:风扇由柴油机驱动如图4所示。当机器关闭时,它将很快停止下来。离合器用于分离风扇以便其能依靠惯性停止,这样避免了风扇急停高惯量带来对机器的压力。
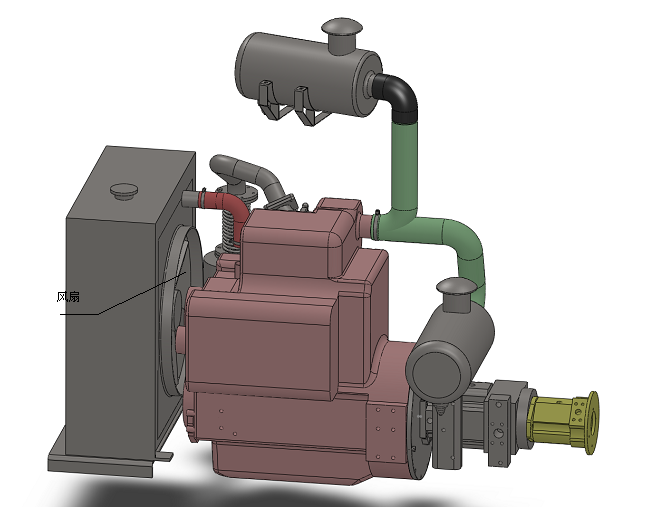
图4
轴-联接件-轴传输
有三种轴-联接件-轴动力传输
带驱动
链驱动
齿轮驱动
带驱动用合成或者天然橡胶带绕在两个毂上,链驱动和带驱动相似,只是它的链子是金属的,毂上有齿。齿轮驱动用旋转含有齿的毂啮合在一起。
这三种形式的驱动都广泛应用在增加和降低速度和力矩传输到驱动轴。通过选择不同的毂的大小来实现。
齿轮传动通常用于两轴距离较近,力和力矩增加和降低很高,或者驱动密封。通常用于齿轮箱。
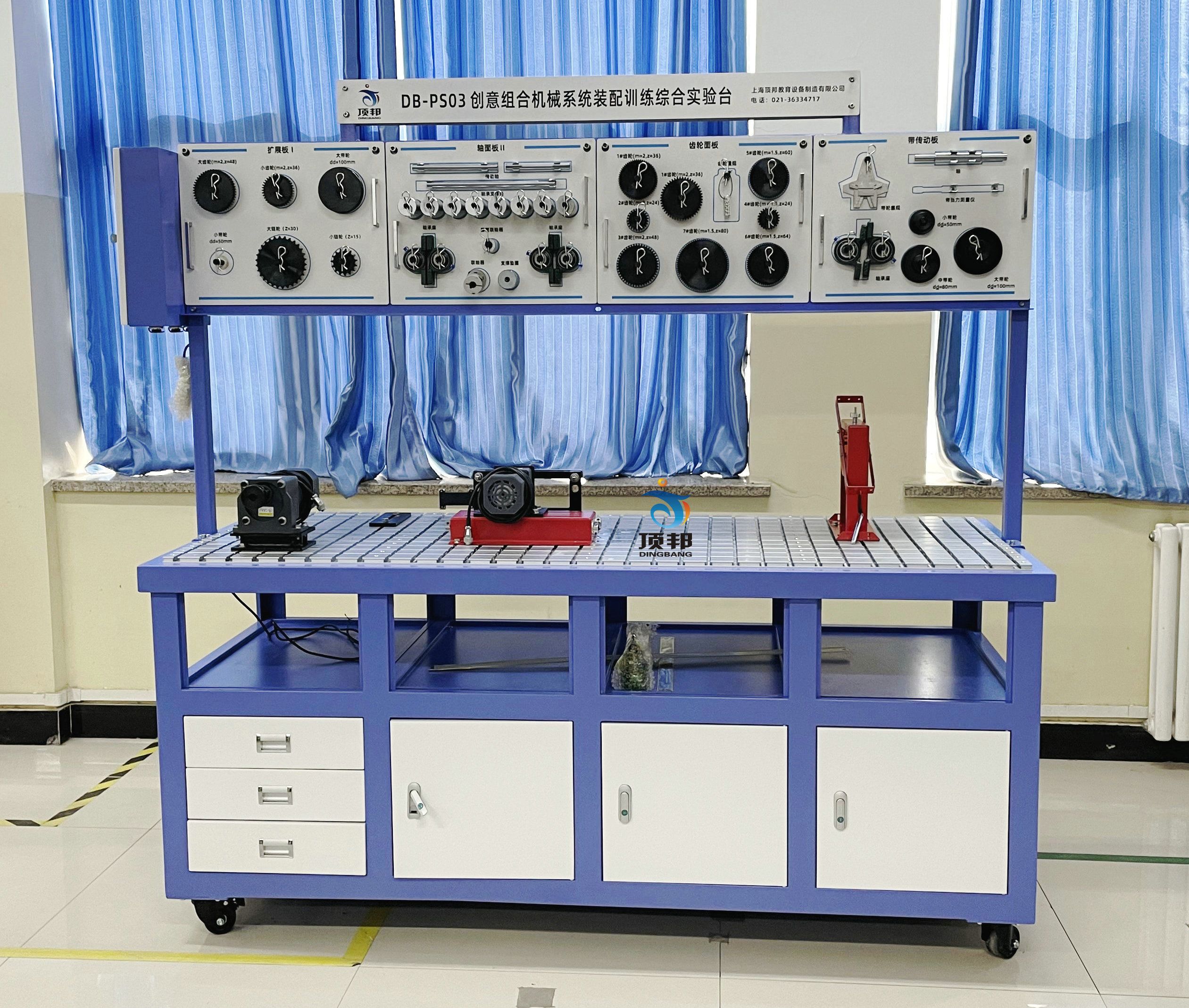
一、概述:
创意组合机械系统装配训练综合实验台以全新的机械基础创新、教学、实验、培训新理念,运用模块化、人机工程学设计理论,高精度制造技术制造而成。配有多媒体模拟实验教学软件,是学习者巩固机械基础理论和培训掌握机械安装、调试、测量的实际操作技能的必备实验设备(大学本科、专科适用)。
二、实验目的和意义
1)通过实验将枯燥的机械概念通过实体的运行得到直观体现。使学习者获得学习的兴趣和理论概念的巩固。
2)通过实验使学习者建立起清晰的机械装配、安装调整及同轴度、平行度等形位公差的概念。
3)通过实验获得对分析、评判处理机械加工误差、装配误差等系统综合误差对机械传动性能影响的实际能力。
4)通过实验使学习者学会和掌握机械工卡量具的使用和获得长度测量、角度测量等尺寸与形位公差测量的相关知识。
5)该设备可供6-8个学生双面操作,零件存放有序,便于实验和管理。
三、实验内容
实验(教程)一、机械传动系统的组成
实验(教程)二、链联接的安装与测量
实验(教程)三、动力传输系统的安装
实验(教程)四、V型带传动的安装与调节
实验(教程)五、链传动的安装与调节
实验(教程)六、直齿轮传动的安装与调节
实验(教程)七、多轴传动的安装与调节
实验(教程)八、符合标准与加工超差传动件的性能对比分析
实验(教程)九、有轴向力传动零件的搭接与运转分析
实验(教程)十、曲柄摇杆工作系统的搭接、运转与分析
实验(教程)十一、曲柄滑块工作系统的搭接、运转与分析
实验(教程)十二、带传动与齿轮传动组合
实验(教程)十三、齿轮传动与链传动组合
实验(教程)十四、带与链传动组合
实验(教程)十五、V带传动与曲柄滑块机构组合
实验(教程)十六、链传动与曲柄连杆机构组合分析
实验(教程)十七、机构运动参数的测试分析实验
四、功能与特点
1)本实验台能够进行单轴的安装分析、共线轴系、平行轴系的联接与运转测量、带传动、链传、齿轮传、机械传动系统的安装、测量以及对比分析。不同转速、载荷条件下的简单特性比较。
2)本实验台突破了传统轴系搭接的静态理念,在轴系搭接完成后,通过实际运转,体验安装的相关问题。
3)实验台是将机械测量同性能相互联系,在运转的环境下,对精度建立起直观的概念。
4)在安装过程中,掌握相关工业测量量具的使用,直接提高动手能力。
5)多种传动类型的比较分析,充分理解不同传动类型的特点及其适用范围。
6)配备了详尽实验指导书。
四、系统主要技术参数
1、电机(2台): 61K250RA-CF 电压:220V 250W; 转速:0-1440rpm
51K60RGN-CF电压:220V 60W; 转速:0-300rpm
2、直线位移传感器(1个):量程150mm;
3、水平仪(可测水平、垂直、45°)
4、光栅角位移传感器(1个): 脉冲数1000p;
5、外形尺寸: 2100×780×2050mm
6、重量: 约400kg
|
序 号 |
名 称 |
规 格 |
数 量 |
备 注 |
|
1 |
塞尺 |
150mm 0.02-1 |
1 |
|
|
2 |
多用水平仪 |
|
1 |
可测水平、垂直、45° |
|
3 |
组合角尺 |
0-102mm |
1 |
|
|
4 |
百分表 |
0.01mm/格 |
1 |
|
|
5 |
磁性表座 |
203X63X6(长X宽X高) |
1 |
|
|
6 |
数字转速表 |
测量范围0-999.9RPM/1000-9999.9RPM |
1 |
|
|
7 |
机油壶 |
200ml |
1 |
|
|
8 |
钢板尺 |
0-1000mm |
1 |
|
|
9 |
游标卡尺 |
0-150mm |
1 |
|
|
10 |
外径千分尺 |
0-25mm |
1 |
|
|
11 |
钢板尺 |
0-300mm |
1 |
|
|
12 |
内六角扳手 |
1.5#-10# |
1套(9件) |
|
|
13 |
呆扳手 |
10-12 |
2 |
|
|
|
|
12-14 |
2 |
|
|
|
|
14-17 |
2 |
|
|
14 |
噪声仪 |
SJ-1 |
1 |
|
|
15 |
十字螺丝刀 |
6寸 |
2 |
|
|
16 |
一字螺丝刀 |
3寸4寸 |
各1把 |
|
|
17 |
尖嘴钳 |
|
1 |
|
|
18 |
活动扳手 |
8寸 |
1 |
|
|
19 |
半圆锉 |
半径R8.5左右 |
1 |
可锉17mm大内孔 |
|
20 |
圆锉 |
7寸 |
1 |
|
|
21 |
老虎钳 |
6寸 |
1 |
|
|
22 |
带张力测量仪 |
|
1 |
|
|
23 |
橡胶榔头 |
|
2 |
|
|
24 |
平锉 |
10寸 |
2 |
|
|
25 |
钢锯 |
|
1 |
|
|
26 |
平口钳 |
5寸 |
1台 |
|
六、配置清单
|
序号 |
名称及规格 |
数量 |
|
1 |
齿轮1 m2 Z36 |
3 |
|
2 |
齿轮2 m2 Z24 |
2 |
|
3 |
齿轮3 m2 Z48 |
2 |
|
4 |
齿轮4 m1.5 Z26 |
2 |
|
5 |
齿轮5 m1.5 Z60 |
2 |
|
6 |
齿轮6 m1.5 Z64 |
1 |
|
7 |
齿轮7 m1.5 Z80 |
1 |
|
8 |
齿轮8 m2 Z80 |
2 |
|
9 |
齿轮9 m2 Z90 |
2 |
|
10 |
小链轮P=12.7 Z=15 |
1 |
|
11 |
中链轮P=12.7 Z=20 |
1 |
|
12 |
大链轮P=12.7 Z=30 |
1 |
|
13 |
小带轮 34° |
1 |
|
14 |
中带轮 34° |
1 |
|
15 |
大带轮 34° |
1 |
|
16 |
小齿轮 m2 Z36此为错误设计 |
1 |
|
17 |
大齿轮 m2 Z48此为错误设计 |
1 |
|
18 |
小带轮 37°此为错误设计 |
1 |
|
19 |
大带轮 31°此为错误设计 |
1 |
|
20 |
小链轮此为错误设计P=12.7 Z=15 |
1 |
|
21 |
大链轮此为错误设计P=12.7 Z=30 |
1 |
|
22 |
小斜齿轮Ⅰ 15°Mn=1.5 z=26 |
1 |
|
23 |
大斜齿轮Ⅰ 15°Mn=1.5 Z=69 |
1 |
|
24 |
小锥齿轮m=2 Z=25 |
1 |
|
25 |
大锥齿轮m=2 Z=50 |
1 |
|
26 |
小斜齿轮Ⅱ 22°Mn=1.5 Z=26 |
1 |
|
27 |
大斜齿轮Ⅱ 22°Mn=1.5 Z=69 |
1 |
|
28 |
滚动轴承座UP203 |
8 |
|
29 |
滚动轴承座UP205 |
4 |
|
30 |
滑动轴承座HZ020 |
4 |
|
31 |
传动轴1 |
9 |
|
32 |
传动轴2 |
2 |
|
33 |
传动轴3 |
2 |
|
34 |
套筒联轴器 |
1 |
|
35 |
爪式弹性联轴器 |
2套 |
|
36 |
弹性中间盘 |
2 |
|
37 |
套垫82.8高(24件) 76.5高(4件)33高(4件)82.5高(4件) |
36 |
|
38 |
垫圈 |
4 |
|
39 |
调整垫片(3种)0.1mm-12件;0.2、0.3、mm-各12件; |
48 |
|
40 |
轴面板1 |
1 |
|
41 |
轴面板2 |
1 |
|
42 |
带传动板 |
1 |
|
43 |
链轮面板 |
1 |
|
44 |
齿轮面板 |
1 |
|
45 |
扩展板1 |
1 |
|
48 |
扩展板2 |
1 |
|
49 |
扩展板3 |
1 |
|
50 |
轴端挡圈1 |
10 |
|
51 |
轴端挡圈2 |
12 |
|
52 |
轴端挡圈3 |
10 |
|
53 |
连杆Ⅰ |
1 |
|
54 |
连杆2 |
1 |
|
55 |
曲柄 |
1 |
|
56 |
滑块销轴 |
1 |
|
57 |
摇杆 |
1 |
|
56 |
曲柄销轴 |
1 |
|
57 |
铰接轴 |
1 |
|
58 |
传感器连接轴 |
1 |
|
59 |
机构滑块 |
2套 |
|
60 |
机构支架 |
2套 |
|
61 |
机构滑轨 |
1 |
|
62 |
线位移支架 |
1 |
|
63 |
光电编码器支架 |
1 |
|
64 |
线位移联接轴 |
1 |
|
65 |
马蹄卡 |
1 |
|
66 |
光电编码器 |
1 |
|
67 |
直线位移传感器 |
1 |
|
68 |
制动轮毂 |
1套 |
|
69 |
电机活动调整螺母 |
4 |
|
70 |
制动器 |
1套 |
|
71 |
电机调整座 |
1 |
|
72 |
电机联轴器内孔¢12 |
2 |
|
73 |
交流电机61K250RA-CF |
1台 |
|
74 |
交流减速速电机51K60RGN-CF |
1台 |
|
75 |
光轴电机座 |
1 |
|
76 |
电机等高座 |
1 |
|
77 |
链条拉力器 |
1 |
|
78 |
等高点调整块 |
2 |
|
79 |
带张力测量仪 |
1 |
|
80 |
链条 |
1 |
|
81 |
皮带A型 900 |
1 |
|
82 |
轮槽规1 Y型 |
1 |
|
83 |
轮槽规2 Z、A、B、C型 |
1 |
|
84 |
轮槽规3D、I型 |
1 |
|
85 |
带型规1Y、Z、A、B、C型 |
1 |
|
86 |
齿条规:m=1.5、2 ; m=2.5、3;m=4、5; |
各1共3 |
|
87 |
垫板180×70×10 |
1 |
|
88 |
卡子 |
67 |
|
77 |
园头平键5×5×20 |
15 |
|
78 |
外六角螺杆M4×10 |
8 |
|
79 |
外六角螺钉M8×110 |
50套(件) |
|
80 |
外六角螺钉M8×25 |
20套(件) |
|
81 |
外六角螺钉M8×60 |
6套(件) |
|
82 |
机械系统创新设计搭接装配实训实验台 |
1 |
|
83 |
电器控制箱 |
1套 |
|
84 |
数据采集箱 |
1 |
|
85 |
机构测试软件 |
1套 |