智能网联汽车传感器装调与测试技术平台,智能网联汽车实训台
一、产品简介
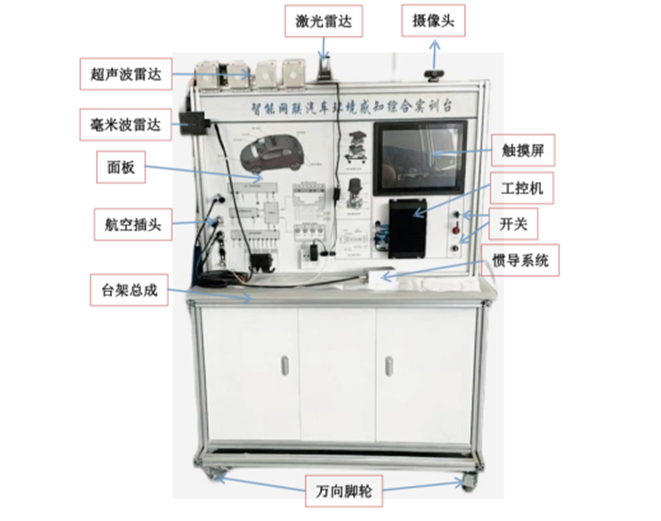
智能网联汽车传感器装调与测试技术平台基于车辆模型设计开发,台架通过毫米波雷达、超声波雷达、激光雷达、相机、组合导航智能传感器的原理介绍、结构展示、装调与标定、故障诊断、数据检测及考核功能,实现智能网联汽车传感器的理论与实践教学项目。平台包含毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器,配套上位机软件以及其他配套模块等。
适用于智能网联汽车传感器的理论与实践教学。
二、传感器基本配置及技术指标
1.激光雷达:
(1)镭神激光雷达1只;
(2)技术指标
扫描通道:16线; 激光波长:905nm ,垂直视场角:-15°~+15°,探测距离:150m 测量精度:±3cm 供电范围:9V-36VDC;工作温度:-20℃-60℃;通信接口:以太网pps 尺寸:120*110mm 重量:1600g;
2.毫米波雷达:
(1)毫米波雷达1只;
(2)技术指标
工作频率:76~77GHz;
探测距离:
远距:0.2…250m;
近距:0.2…70m@0…±45°;
0.2…20m@0…±60°;
水平展开角:
远距:-9°~9°;
中距:-45°~45°;
近距:-60°~60°;
垂直展开角:14°;
通信接口:CAN;
速度分辨率: 0.37km/h;
测速精度:±0.1km/h;
输入电压:8~32V DC;
工作温度:-40-85℃ ;
功耗:6.6W(典型值);
机械振动: 符合LV124;
3.超声波雷达:
(1)超声波雷达控制器1只﹑超声波探头8只﹑
(2)技术指标
超声波雷达前后探头:
(1) 采用 4 度支架;
(2) 频率 58khz;
(3) 水平角度 90°;
(4) 垂直角度 45°;
(5) 最远探测距离 4m;
超声波雷达侧边探头:
(1) 采用 8 度支架;
(2) 频率 48khz;
(3) 水平角度 50°;
(4) 垂直角度 50°;
(5) 最远探测距离 4m;
通信接口:CAN;
输入电压:12V/3A;
工作温度:-40-85℃;
防水防尘:IP67;
4.双目相机:
(1)双目相机1只;
(2)技术指标
处理单元:FPGA、双核ARM处理器;1GB内存;8GB Flash存储;
分辨率:1280x720;
通信接口:千兆网口、RS485、CAN;
输入电压:12V/1A;
工作温度:-30℃~70℃;
5.组合导航:
(1)组合导航1套﹑GPS天线2只﹑天线底座2只。
(2)技术指标
定位精度 RTK:
水平2cm+1ppm
高程 4cm+1ppm
数据更新率 GNSS
数据更新率: 1Hz、 5Hz、 10Hz
组合数据更新率: 1Hz、 10Hz、 50Hz、 100Hz、 200Hz
姿态精度:
定向精度:0.2° ( 1m 基线)
横滚/俯仰:0.1° ( RMS)
陀螺:
量程:± 500° /s
零偏稳定性:≤3° /h
加速度计:
量程:± 8g
零偏稳定性: <1mg
工作温度:-40℃ ~ +85℃
存储温度:-55℃ ~ +95℃
防护等级:IP54
电源要求: 9~28VDC
功耗: ≤10W
通信接口:
PHY、RS232、CAN、USB
GNSS:
定位天线: FAKRA type D, 50Ω 额定阻抗
定向天线: FAKRA type A, 50Ω 额定阻抗
输入增益: 20~36dB
6.电脑与显示屏(安装配套运行上位机软件):
I7CPU;8G 运存;128G SSD;USB*4;网口*2; HDMI*1;VGA*1内置无线网卡和天线预装 ROS 系统和集成导航系统工业级工控机,显示屏18.5 寸,分辨率 1920*1080。
三、功能特点
1. 激光雷达部分:
1) 通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云。
2) 可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定;
3) 通过激光雷达感知算法控件,通过调节探测范围、滤波阀值、分割参数等参数,改变点云识别状态并对障碍物进行标识,实现对激光雷达识别算法的理解;可以测出障碍物与试验台自身的真实距离。
4) 设置安全区域,安全区域内障碍物将被标志识别。
5) 多种数据源输入,可调用激光雷达实时数据,录制的数据包、仿真实训台输出点云;
2、摄像头部分:
1) 通过软件进行摄像头的内参标定,生成标定文件;可加载不同的标定文件,观察摄像头的畸变矫正效果。
2) 提供目标识别算法和车道线识别算法;通过加载不同识别算法,界面显示不同的识别功能,进行不同项目的功能实训。
3) 多种数据源输入,可调用摄像头实时数据、录制的数据包、视频图像、仿真实训台输出图像;
3、毫米波部分
1) 系统提供人机友好交流界面,可实时更改雷达参数设置,观测调试效果。
2) 可准确识别静态与动态障碍物,显示距离、速度、位置等数据。
3) 可以设置毫米波雷在x,y上的坐标值,实现外部参数的标定,显示标定后的毫米波检测图像,修改x,y坐标后可以看到障碍物相对于坐标原点的变化;检测结果可通过ROI区域设置,实现需求区域障碍物检测过滤。
4、超声波雷达部分
通过发送不同指令,超声波模块可返回不同探测模式的数据,可演示不同探测模式下的探测精度和探测范围。
5、组合惯导部分
1) 进行组合导航标定,包括初始对准、导航模式配置、坐标轴配置、端口输出数据配置等;接收组合导航数据信息;可以实时读取GNSS卫星数据及惯导姿态数据,可对定位误差设置、解析定位误差、校准定位精度;
2) 设备具备RTK差分定位功能,可进行RTK差分定位系统原理教学实训;具备双RTK天线,进行相关定向实训。
6、传感器信号检测与故障诊断
1)平台设计有型号检测端口,用于传感器的信号检测,满足多频次测量;
2)平台参照车辆位置布局设计,设计有故障设置装置,可设置信号线束故障,满足考核实训。
7、感知融合
设备具备感知融合功能,通过激光雷达和摄像头的联合标定,实现感知融合结果输出,并在界面上显示。
8、设备底座框架采用40mm×40mm一体化全铝合金型材搭建,耐油耐腐蚀并易于清洁,面板箱左右上侧采用圆弧设计﹑1.5mm厚冷板冲压成形,安装宽40cm﹑1.5mm厚冲压成形冷板台面,经久耐用,设备带4个带自锁装置万向脚轮,便于移动。
9、UV平板喷绘彩色面板完整展示毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器结构与工作原理图,并安装用检测端子,可实时检测各种状态下参数变化。
四、技术规格
1.外形尺寸(mm):1600×700×1700mm(长*宽*高)
2.输入电源: AC220V±10% 50Hz
3.工作温度:-20°~60°
五、实训(验)项目
1.毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器结构认知;
2.毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器原理功能认知;
3.毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器功能演示﹑验证;
4.毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器安装调试、检测、标定与应用﹑验证;
5.毫米波雷达、超声波雷达、激光雷达、相机、组合导航传感器故障检测与排除;
X
截屏,微信识别二维码
微信号:13817525788
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!
