[规格型号]:DB-SD23
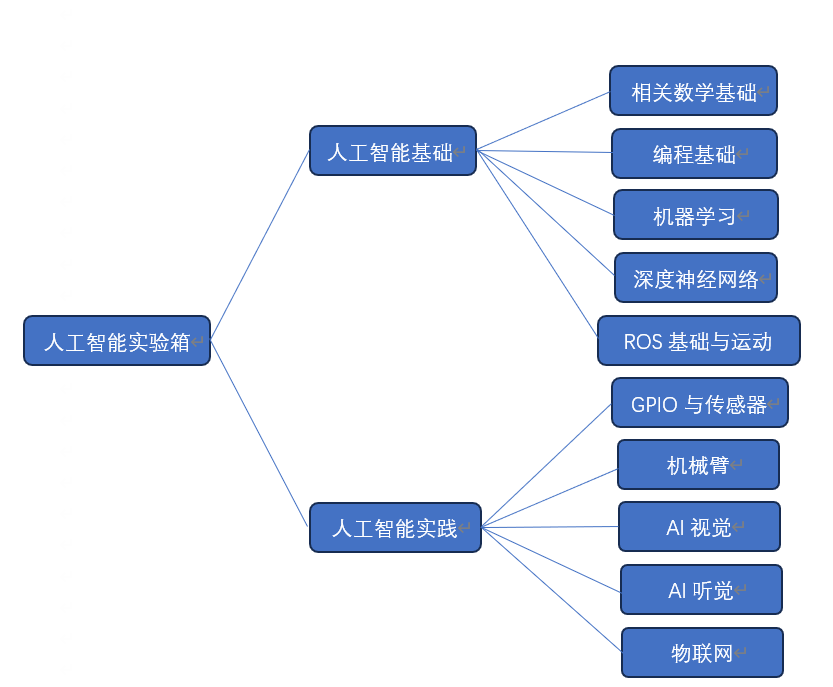
[产品名称]:AI人工智能实验箱
[价 格]:询价










| 功能单元 | 参数 | 功能描述 |
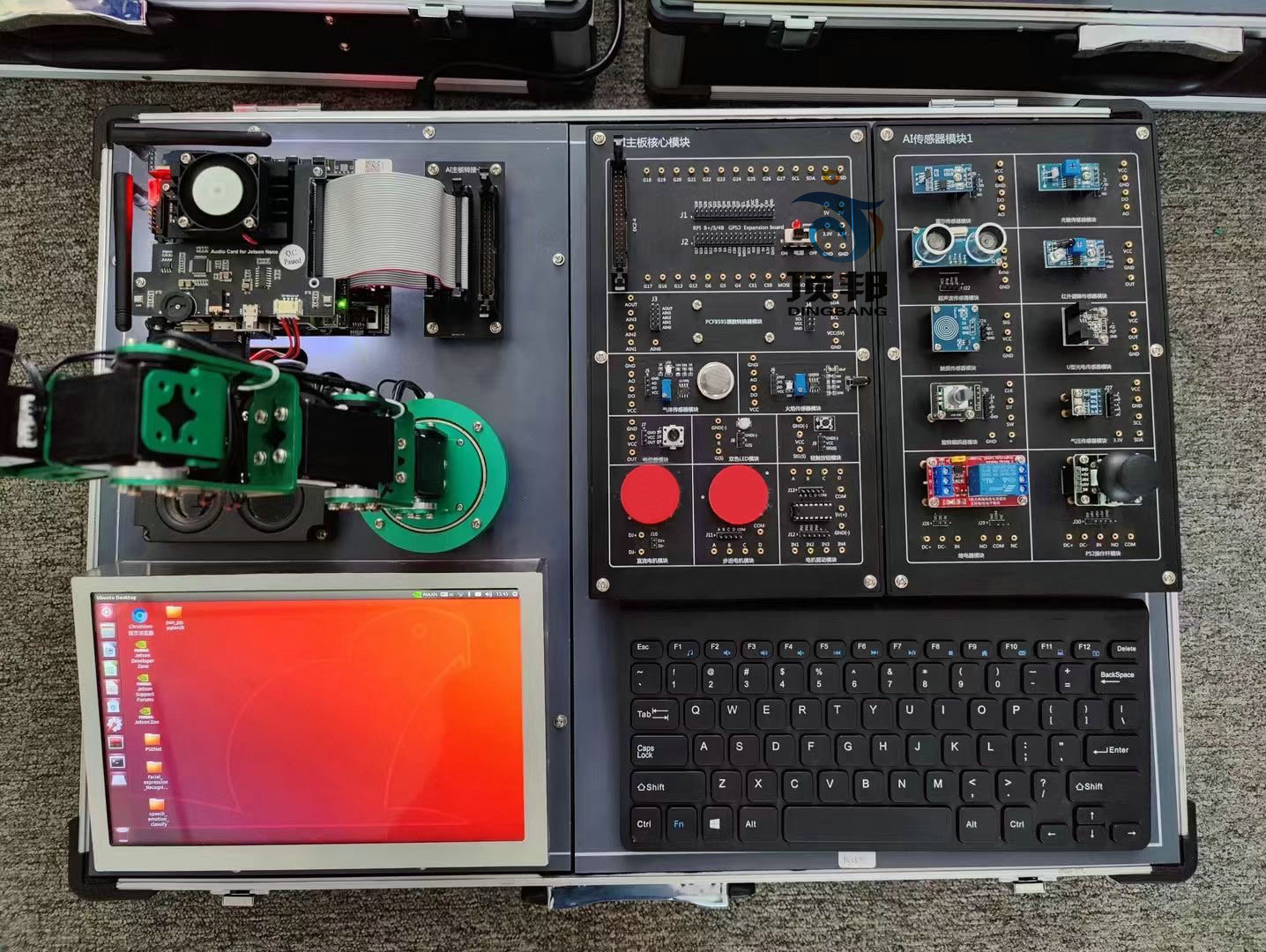
| 实验箱 | 外形尺寸:≥610*440*240mm; | 外箱采用铝木合金材料,四周安装尼龙防护垫,实验箱体内部包含存储空间,可以妥善存放模块及配件,打开方式为按压弹出。 |
| AI运算单元 |
GPU :128核 NVIDIA Maxwell GPU; CPU :4核cortex-A57处理器; 内存:4 GB LPDDR 25.6 GB/s; 算力:472 GFLOP; 核心扩展:拥有最少4个USB3.0接口,支持HDMI和DP视频接口,一路M.2接口的单路PCIE,并安装有散热风扇, 40pin GPIO; 网络:千兆以太网口、无线网卡支持2.4Ghz/5GHZ,支持蓝牙4.2; |
安装Ubuntu 18.04 LTS+ROS Melodic操作系统,集成JupyterLab开发环境、Anaconda 4.5.4虚拟环境,支持一系列流行的AI框架和算法,比如TensorFlow、caffe/caffe2、Keras、Pytorch、MXNET 等,系统安装有OpenCV计算机视觉库,TensorFlow AI框架,Pytorch AI框架。 |
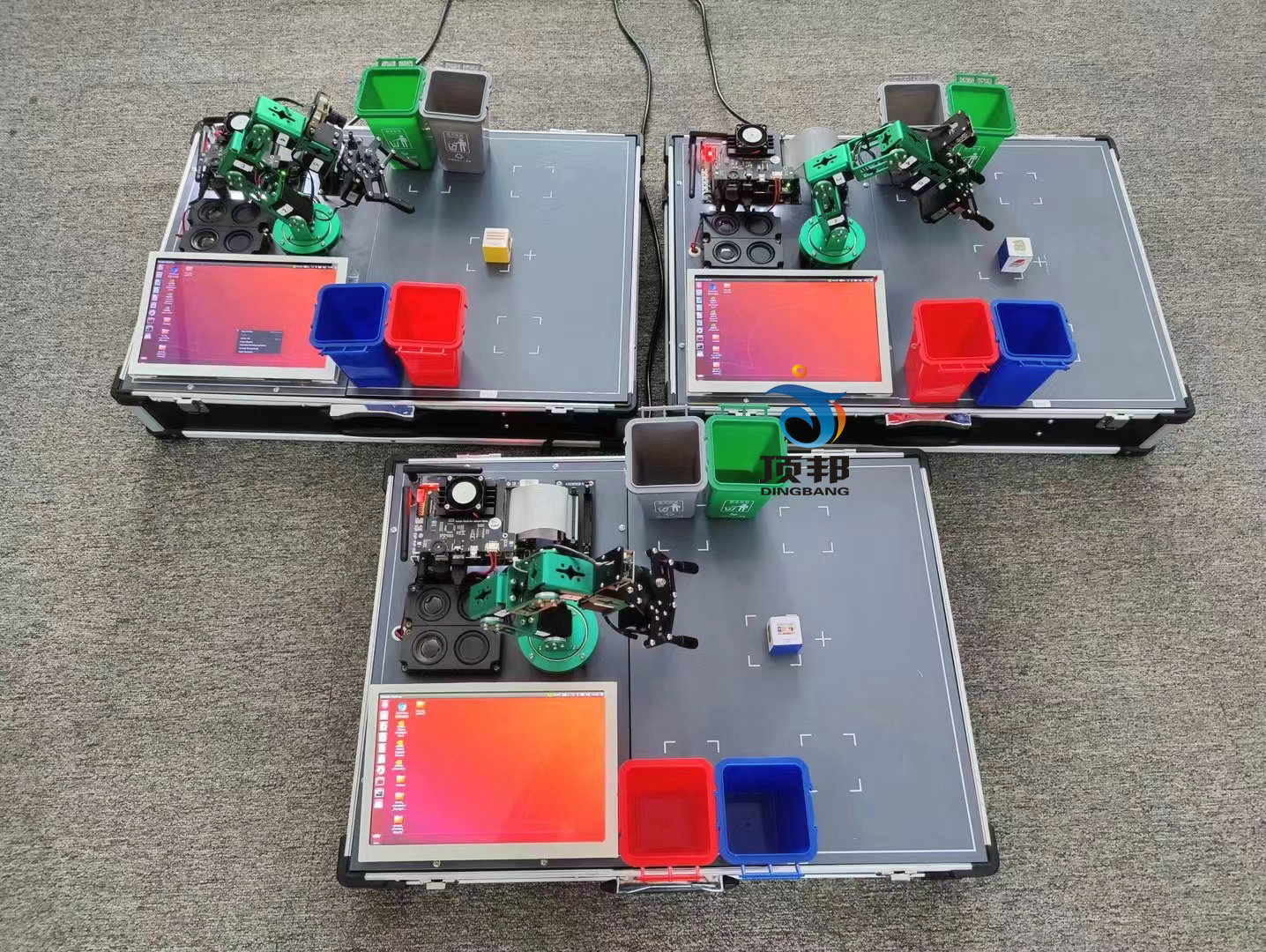
| 机械臂 |
机械臂自由度:5自由度+夹持器,200g有效负载,臂展350mm; 舵机方案:15Kg*5+6Kg*1智能串行总线舵机; 材质:阳极氧化处理铝合金; |
用于机器人运动学与机器人系统,可以完成夹持积木等动作。 |
| 嵌入式核心主板 |
接口:6个总线舵机接口, PWM舵机接口,i2C接口,除AI核心板外还支持STM32和Raspberry Pi; OLED:显示CPU占用,显示内存占用,显示IP地址等基础信息; 按键:K1+K2键+RESET键; 1 个RGB灯; |
用于支持机械臂动作。 |
| 摄像头 | 采用USB接口,30万像素,110度广角摄像头,480P分辨率(600*480) | AI视觉实验,如垃圾分拣等实验。 |
| AI听觉单元 |
音频芯片:采用SSS1629音频芯片; 麦克风:板载两个高质量MEMS硅麦克风; 接口:标准3.5mm耳机接口、双通道喇叭接口; |
采用USB接口设计,免驱动,多系统兼容,可左右声道录音,音质更加。可以完成AI听觉类实验。 |
| 传感器实验模块 |
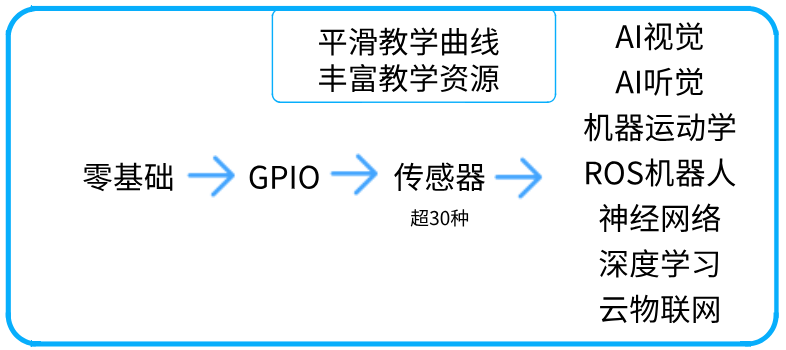
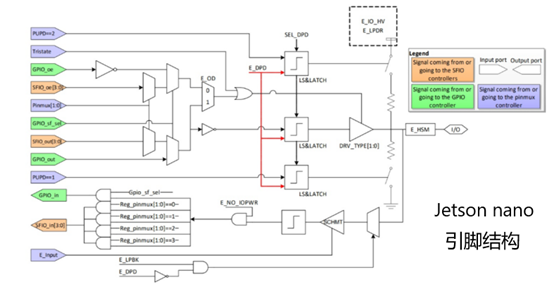
传感器实验模块将Jetson nano的GPIO接口引出,方便完成GPIO实验,并且包含以下实验课程:双色LED、 继电器、 轻触开关按键、U 型光电传感器、模数转换、PS2 操纵杆、电位器、模拟霍尔传感器、光敏传感器、火焰报警、气体传感器、触摸开关、超声波传感器距离检测、旋转编码器、红外避障传感器、气压传感器、陀螺仪加速度传感器、循迹传感器、直流电机风扇模块、步进电机驱动模块; |
传感器实验模块可以更好的帮助学习者更加快速的入门Jetson nano的GPIO控制,从基础入手,完成实验项目。同时引出的GPIO和可移动的模块也使我们后续的使用和开发更加方便。 |
| 显示屏 | 10寸显示屏,HDMI接口,1080P分辨率。 | 显示屏倾斜安装,倾斜角度大于5°。用于操作系统显示。 |
| 键盘鼠标 | 干电池供电,无线蓝牙连接。 | 用于系统控制。 |
| 教学课程 | 课程内容 |
| 矩阵论 | 标量、向量、矩阵、张量 |
| 矩阵和向量相乘 | |
| 单位矩阵和逆矩阵 | |
| 线性相关和生成子空间 | |
| 范数 | |
| 特殊类型的矩阵和向量 | |
| 迹运算 | |
| Moore-Penrose伪逆 | |
| 概率与信息论 | 随机变量与概率分布 |
| 离散型变量与概率分布律 | |
| 常见的离散型概率分布 | |
| 连续型变量和概率密度函数 | |
| 常见的连续性概率分布 | |
| 联合概率 | |
| 边缘概率 | |
| 条件概率 | |
| 独立性和条件独立性 | |
| 期望、方差和协方差 | |
| 信息论 |
| 教学课程 | 课程内容 |
| 变量与基本数据类型 | 变量 |
| 基本数据类型 | |
| 列表和元组 | 列表 |
| 元组 | |
| 字典与集合 | 字典 |
| 集合 | |
| 类和对象 | 面向对象概述 |
| 类的定义和使用 | |
| 属性 | |
| 继承 | |
| 模块化程序设计 | 函数创建和调用 |
| 参数传递 | |
| 深度学习框架简介 | TensorFlow |
| PyTorch | |
| Caffe/caffe2 | |
| PaddlePaddle | |
| Linux开发环境简介 | Ubuntu操作系统 |
| 常用命令行 |
| 教学课程 | 课程内容 |
| 基本概念 | 训练集、测试集、验证集 |
| 过拟合、欠拟合、泛化 | |
| 学习率、正则化、交叉验证 | |
| K-近邻算法 | 基本概念 |
| K的选取 | |
| 距离的度量 | |
| 支持向量机 | 间隔与支持向量 |
| 对偶问题 | |
| 核函数 | |
| 软间隔与正则化 | |
| K-均值聚类 | K-均值聚类 |
| 决策树和随机森林 | 决策树的基本概念 |
| 选择最佳划分标准 | |
| 随机森林 | |
| 神经网络 | 神经元模型 |
| 感知器 | |
| 多层感知器 | |
| 经验风险和结构风险 | |
| 梯度下降和反向传播 | |
| RBF网络 | |
| 超限学习机 | |
| 神经网络训练技巧 |
| 教学课程 | 课程内容 |
| 人工智能 | 人工智能、机器学习与深度学习 |
| 深度学习 | 深度学习的发展历程 |
| 卷积神经网络 | 发展历程 |
| 基本结构 | |
| 前馈运算与反向传播 | |
| 相关性质 | |
| 卷积神经网络变种 | |
| 常用卷积神经网络模型 | |
| 循环神经网络 | 循环神经网络简介 |
| 长短时记忆网络神经 | |
| 循环神经网络的变体 | |
| 生成对抗网络 | 生成对抗网络简介 |
| 生成对抗网络基本结构 | |
| 生成对抗网络变种 |
| 实验课程 | 课程内容 |
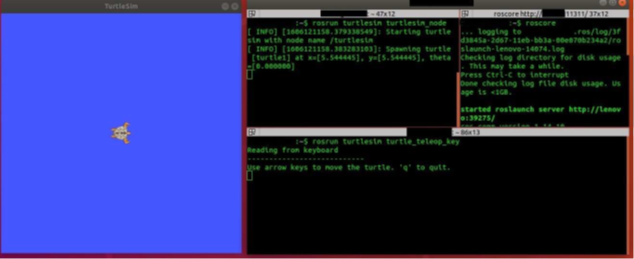
| ROS基础与运动学 | ROS基础课程 |
| ROS创建工程项目 | |
| 自定义消息 | |
| Server通讯 | |
| 机械臂URDF模型 | |
| 机械臂运动学正反解 | |
| MoveIt配置 | |
| 智能串行总线舵机 | |
| PC上位机控制 | |
| 机械臂自定义学习动作组 | |
| 机械臂关节弧度及末端姿态控制 | |
| 机械臂工作区域内抓取、搬运 | |
| 6自由度逆运动学控制 |
| 实验课程 | 课程内容 |
| Jetson nano GPIO课程 | 双色LED控制 |
| 电位器检测 | |
| 继电器控制 | |
| 轻触开关按键 | |
| PCF8591模数转换 | |
| PS2操纵杆 | |
| 触摸开关控制 | |
| 直流电机风扇 | |
| 步进电机驱动 | |
| 传感器实验课程 | 模拟霍尔传感器 |
| 模拟温度传感器 | |
| 火焰报警 | |
| 烟雾传感器 | |
| 超声波传感器距离检测 | |
| 旋转编码器 | |
| 红外避障传感器 | |
| BMP180气压传感器 | |
| MPU6050陀螺仪加速度传感器 | |
| 循迹传感器 |
| 实验课程 | 课程内容 |
| 机械臂基础课程 | 用户按键控制 |
| 蜂鸣器控制实验 | |
| OLED控制实验 | |
| 控制单个舵机 | |
| 同时控制6个舵机动作 | |
| 读取舵机当前位置 | |
| 机械臂关节标定实践 | |
| 机械臂关节弧度及末端姿态控制 | |
| 机械臂舞蹈表演 | |
| 机械臂搬运色块实践 | |
| 机械臂搬运码垛色块实践 | |
| 机械臂抓取工作区域九点标定 | |
| 机械臂抓取工作区域物块测试 |
| 实验课程 | 课程内容 |
| AI视觉开发课程 | 安装和使用Matplotlib、Pyplot 和 Numpy |
| 在OpenCV中运行摄像头 | |
| JetCam库中测试USB摄像头 | |
| OpenCV读取、写入和显示图像 | |
| OpenCV读取、显示和保存视频 | |
| OpenCV绘图函数使用 | |
| OpenCV图像质量和像素操作 | |
| OpenCV图片剪切 | |
| OpenCV图片平移 | |
| OpenCV图片镜像 | |
| OpenCV仿射变换 | |
| OpenCV图片缩放 | |
| OpenCV图片旋转 | |
| OpenCV图片处理 | |
| OpenCV灰度处理 | |
| OpenCV图像美化 | |
| OpenCV边缘检测 | |
| OpenCV二值化处理 | |
| OpenCV矩形圆形绘制 | |
| OpenCV文字图片处理 | |
| OpenCV线段绘制 | |
| OpenCV彩色图片直方图 | |
| OpenCV直方图均衡画 | |
| OpenCV图片修补 | |
| OpenCV亮度增强 | |
| OpenCV高斯均值滤波 | |
| OpenCV磨皮美白 | |
| OpenCV中值滤波 | |
| AI视觉与机械臂综合课程 | 颜色检测 |
| 脸部和眼睛检测 | |
| 行人检测 | |
| 汽车检测 | |
| 车牌检测 | |
| 目标追踪 | |
| 定位物体实时位置 | |
| 摄像头机械臂物体追踪 | |
| 摄像头机械臂人脸追踪 | |
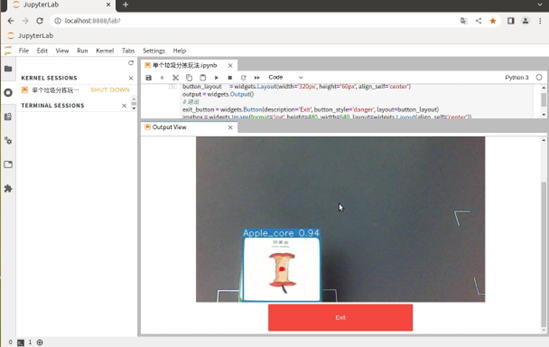
| 色块抓取分拣实验 | |
| 摄像头ArucoTag识别抓取实验 | |
| AI人工智能机械臂与主人互动实践 | |
| AI人工智能机械臂手势识别抓取指定色块进行码垛 | |
| AI人工智能机械臂垃圾分类实践 | |
| 嵌入式视觉应用 | 图像分类 |
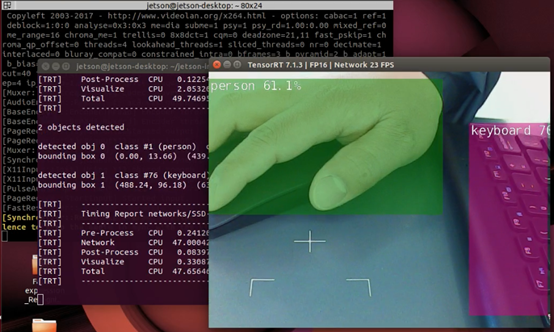
| 物体检测 | |
| 语义分割 | |
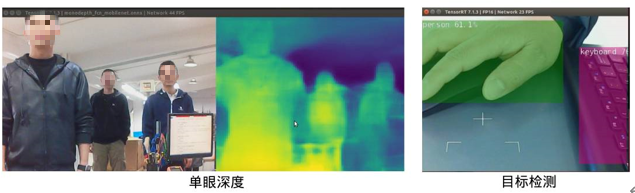
| 目标检测 | |
| 人体姿态动作识别 | |
| 背景移除 | |
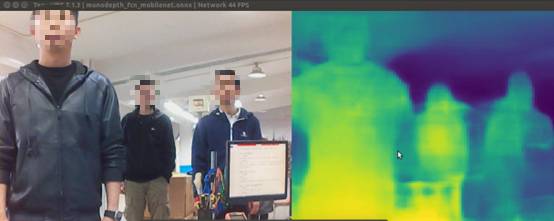
| 单眼深度图 |
| 实验课程 | 课程内容 |
| AI听觉领域前沿算法 | 连接时序分类模型 |
| Attention模型 | |
| 基于HMM的语音识别 | |
| Transformer | |
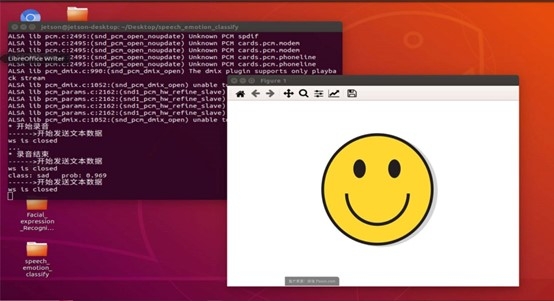
| AI听觉综合实战 | AI听觉领域前沿算法 |
| 在线语音合成 | |
| 语音听写流式 | |
| 图灵机器人 | |
| AIUI | |
| VAD端点检测 | |
| 小薇机器人语音对话 | |
| Snowboy语音唤醒 | |
| 语音情感识别 | |
| 基于 Kaldi 的语音识别实践 |

 光纤通信实验箱
光纤通信实验箱 模拟电路实验箱
模拟电路实验箱 PLC综合实训箱
PLC综合实训箱 微机原理与接口实验仪
微机原理与接口实验仪