三相异步电机调压调速系统调试
三相异步电机调压调速系统调试
一、实训目的
(1) 了解并熟悉双闭环三相异步电机调压调速系统的原理及组成。
(2) 了解转子串电阻的绕线式异步电机在调节定子电压调速时的机械特性。
(3) 通过测定系统的静态特性和动态特性,进一步了解交流调压系统中电流环和转速环的作用。
(4) 提高对系统分析及故障分析处理的能力
二、实训所需挂件及附件
|
序号 |
型 号 |
备 注 |
|
1 |
GDQ01电源控制屏 |
|
|
2 |
DK03 晶闸管主电路 |
|
|
3 |
DK04三相晶闸管触发电路 |
|
|
4 |
DK06电机调速控制电路I |
|
|
5 |
DQ29-2 可调电阻器 |
|
|
6 |
DQ03-1电机导轨、测速系统及数显转速表 |
|
|
7 |
DQ07-1 直流发电机 |
|
|
8 |
DQ11 三相线绕式异步电动机 |
|
|
9 |
GDQ12 线绕式异步电机转子专用箱 |
|
|
10 |
慢扫描示波器 |
自备 |
|
11 |
万用表 |
自备 |
屏上挂件排列顺序:DK03、DK04、DK06、DQ29-2
三、实训线路及原理
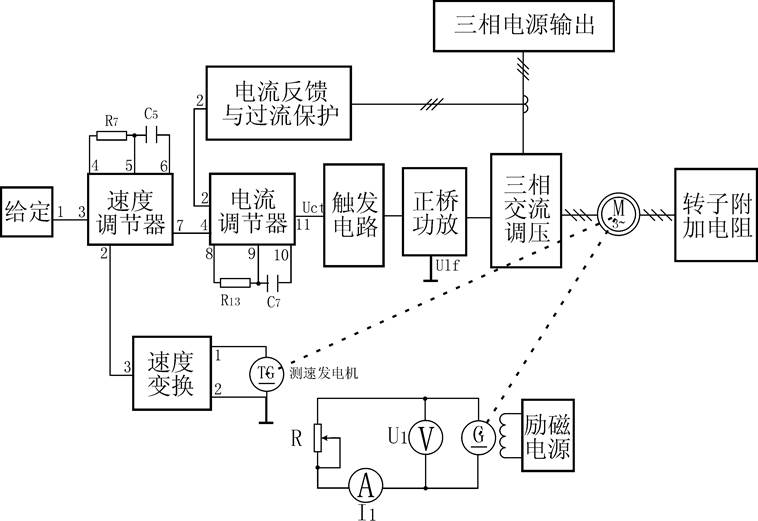
图4-10 双闭环三相异步电机调压调速系统原理图
异步电动机采用调压调速时,由于同步转速不变和机械特性较硬,因此对普通异步电动机来说其调速范围很有限,无实用价值,而对力矩电机或线绕式异步电动机在转子中串入适当电阻后使机械特性变软其调速范围有所扩大,但在负载或电网电压波动情况下,其转速波动严重,为此常采用双闭环调速系统。
双闭环三相异步电机调压调速系统的主电路由三相晶闸管交流调压器及三相绕线式异步电动机组成。控制部分由“调节器Ⅰ、Ⅱ”、 “速度变换”、“触发电路”、“功放电路”等组成。其系统原理框图如图4-10所示:
整个调速系统采用了速度、电流两个反馈控制环。这里的速度环作用基本上与直流调速系统相同,而电流环的作用则有所不同。在稳定运行情况下,电流环对电网扰动仍有较大的抗扰作用,但在启动过程中电流环仅起限制最大电流的作用,不会出现最佳启动的恒流特性,也不可能是恒转矩启动。
异步电动机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正、反转,反接和能耗制动。但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率 Ps=SPM 全部消耗在转子电阻中,使转子过热。
四、实训内容
(1) 测定三相绕线式异步电动机转子串电阻时的机械特性。
(2) 测定双闭环交流调压调速系统的静态特性。
(3) 测定双闭环交流调压调速系统的动态特性。
五、实训方法
(1)DK03和DK04上的“触发电路”调试
①打开GDQ01总电源开关,操作“电源控制屏”上的“三相电网电压指示”
开关,观察输入的三相电网电压是否平衡。
②将GDQ01的“三相同步信号输出”端和DK04“三相同步信号输入”端相连,打开DK04电源开关,拨动 “触发脉冲指示”钮子开关,使“窄”的发光管亮。
③观察A、B、C三相的锯齿波,并调节A、B、C三相锯齿波斜率调节电位器(在各观测孔左侧),使三相锯齿波斜率尽可能一致。
④将DK06上的“给定”输出Ug直接与DK04上的移相控制电压Uct相接,将给定开关S2拨到接地位置(即Uct=0),调节DK04上的偏移电压电位器,用双踪示波器观察A相同步电压信号和“双脉冲观察孔” VT1的输出波形,使α=120°。
⑤适当增加给定Ug的正电压输出,观测DK04上“脉冲观察孔”的波形,此时应观测到单窄脉冲和双窄脉冲。
⑥将DK04面板上的Ulf端接地,用20芯的扁平电缆,将DK04的“正桥触发脉冲输出”端和DK03“正桥触发脉冲输入”端相连,并将DK03“正桥触发脉冲”的六个开关拨至“通”,观察正桥VT1~VT6晶闸管门极和阴极之间的触发脉冲是否正常。
(2)控制单元调试
①调节器的调零
将DK06中“速度调节器”所有输入端接地,用导线将“5”、“6”短接,使“电流调节器”成为P (比例)调节器。调节面板上的调零电位器RP3,用万用表的毫伏档测量电流调节器“7”端的输出,使调节器的输出电压尽可能接近于零。
将DK06中“电流调节器”所有输入端接地,用导线将“9”、“10”短接,使“电流调节器”成为P(比例)调节器。调节面板上的调零电位器RP3,用万用表的毫伏档测量电流调节器的“11”端,使调节器的输出电压尽可能接近于零。
②调节器正、负限幅值的调整
直接将DK06的给定电压Ug接入DK04移相控制电压Uct的输入端,三相交流调压输出的任意两路接一电阻负载(DQ29-2可调电阻器),放在阻值最大位置,用示波器观察输出的电压波形。当给定电压Ug由零调大时,输出电压U随给定电压的增大而增大,当Ug超过某一数值Ug'时,U 的波形接近正弦波时,一般可确定移相控制电压的最大允许值Uctmax=Ug',即Ug的允许调节范围为0~Uctmax。记录Ug'于下表中:
把“速度调节器”的“5”、“6”短接线去掉,使调节器成为PI (比例积分)调节器,然后将DK06的给定输出端接到转速调节器的“3”端,当加一定的正给定时,调整负限幅电位器RP2,使之输出电压为-6V,当调节器输入端加负给定时,调整正限幅电位器RP1,使之输出电压为最小值即可。
把“电流调节器”的“9”、“10”短接线去掉,使调节器成为PI(比例积分)调节器,然后将DK06的给定输出端接到电流调节器的“4”端,当加正给定时,调整负限幅电位器RP2,使之输出电压为最小值即可,当调节器输入端加负给定时,调整正限幅电位器RP1,使电流调节器的输出正限幅为Uctmax。
③电流反馈的整定
直接将DK06的给定电压Ug接入DK04移相控制电压Uct的输入端,三相220V交流电A相,B相,C相经过DK06上的“电流互感器”对应连接到DK03上的主电路输入,电流变换器的输出“TA1、TA2、TA3”无需接(内部已接到电路板),三相交流调压输出接三相线绕式异步电动机,测量三相线绕式异步电动机单相的电流值和电流反馈电压,调节“电流反馈与过流保护”上的电流反馈电位器RP1,使电流Ie=0.5A时的电流反馈电压为Ufi=3V。
④转速反馈的整定
直接将DK06的给定电压Ug接入DK04移相控制电压Uct的输入端,输出接三相线绕式异步电动机,测量电动机的转速值和转速反馈电压值,调节“速度变换”电位器RP1,使n =1300rpm时的转速反馈电压为Ufn=-6V。
(3)机械特性n =f(T)测定
①将DK06的“给定”电压输出直接接至DK04上的移相控制电压Uct,电机转子回路接GDQ12转子电阻专用箱,直流发电机接负载电阻R (DQ29-2可调电阻,将两个900Ω接成串联形式),并将给定的输出调到零。
②直流发电机先轻载,调节转速给定电压Ug使电动机的端电压=Ue。
转矩可按下式计算:
 (5-1)
(5-1)
式中,T为三相线绕式异步电机电磁转矩,IG为直流发电机电流,UG为直流发电机电压,Ra为直流发电机电枢电阻,Po为机组空载损耗。
③调节Ug,降低电动机端电压,在2/3Ue时重复上述实验,以取得一组机械特性。
在输出电压为Ue时:
|
n(rpm) |
|
|
|
|
|
|
|
|
U2=UG (V) |
|
|
|
|
|
|
|
|
I2=IG(A) |
|
|
|
|
|
|
|
|
T(N·m) |
|
|
|
|
|
|
|
在输出电压为2/3Ue时:
|
n(rpm) |
|
|
|
|
|
|
|
|
U2=UG (V) |
|
|
|
|
|
|
|
|
I2=IG(A) |
|
|
|
|
|
|
|
|
T(N·m) |
|
|
|
|
|
|
|
(4)系统调试
①确定“电流调节器”和“速度调节器”的限幅值和电流、转速反馈的极性。
②将系统接成双闭环调压调速系统,电机转子回路仍每相串3Ω左右的电阻,逐渐增大给定Ug,观察电机运行是否正常。
(5)系统闭环特性的测定
①调节Ug使转速至n=1200rpm,从轻载按一定间隔调到额定负载,测出闭环静态特性n =f(T)
|
n(rpm) |
1200 |
|
|
|
|
|
|
|
U2=UG(V) |
|
|
|
|
|
|
|
|
I2=IG(A) |
|
|
|
|
|
|
|
|
T(N·m) |
|
|
|
|
|
|
|
②测出n=800rpm时的系统闭环静态特性n=f(T),T可由(5-1)式计算
|
n(rpm) |
800 |
|
|
|
|
|
|
|
U2=UG (V) |
|
|
|
|
|
|
|
|
I2=IG (A) |
|
|
|
|
|
|
|
|
T(N·m) |
|
|
|
|
|
|
|
(6)系统动态特性的观察
用慢扫描示波器观察:
①突加给定启动电机时的转速n(“速度变换”的 “3”端)及电流I(“电流反馈与过流保护”的“2”端) 及“速度调节器”输出的“6”端的动态波形。
②电机稳定运行,突加、突减负载(20%Ie<=>100%Ie)时的n、I的动态波形。
八、实验报告
(1)根据实验数据,画出开环时电机的机械特性n=f(T)。
(2)根据实验数据画出闭环系统静态特性n=f(T),并与开环特性进行比较。
(3)根据记录下的动态波形分析系统的动态过程。
九、注意事项
(1)在做低速实验时,实验时间不宜过长,以免电阻器过热引起串接电阻数值的变化。
(2)转子每相串接电阻为3Ω左右,可根据需要进行调节,以便系统有较好的性能。
(3)计算转矩T时用到的机组空载损耗Po为5W左右。
X
截屏,微信识别二维码
微信号:13817525788
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!
