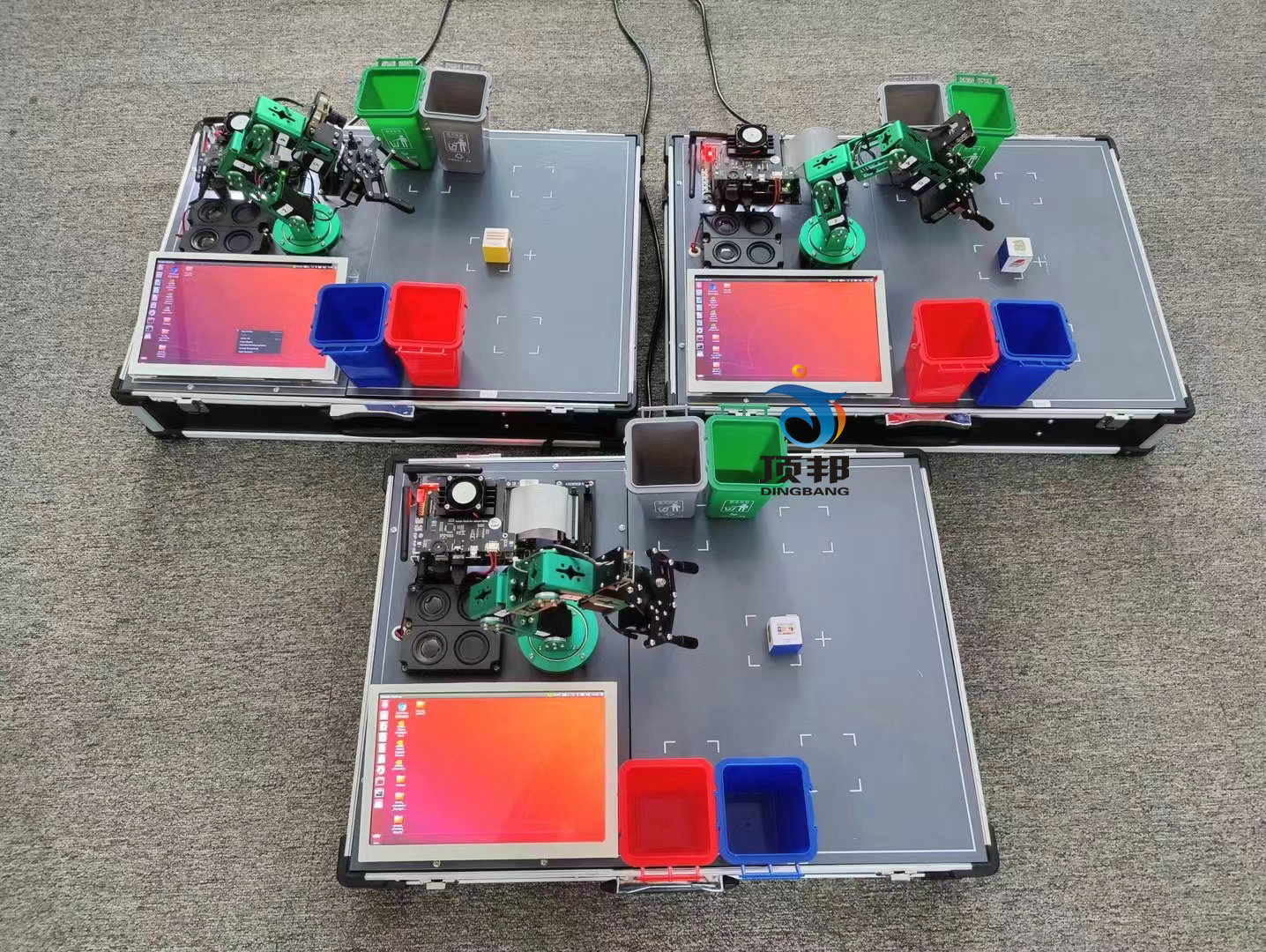
AI�˹�����ʵ���䣬�˹����ܽ�ѧʵ����
һ��������������Ҫ��
1. �����Դ��AC 220V±10% 50HZ��
2. �����Դ��DC��+5V/6A��+7.4V/4A, ��˲ʱ��·��������������
3. �����������¶�-10~+40���϶� ���ʪ��<85%��25���϶ȣ� ����<4000m��
4. װ��������<0.5 KVA��
5. �� ����Լ5 KG��
6. ���γߴ磺≥610*440*240mm��
7. ��ģ�黯��ʵ����Ŀģ�黯�����ں����������죻
8. ��ʵ�������ڲ������洢�ռ䣬�������ƴ��ģ�鼰�������ʽΪ��ѹ������
9. ģ��PCB��Ȳ�С��2mm, �����úڵװ���˿ӡ��ʵ��ģ����������װ��ʵ�������桢����ѧ��ʶ������ͺ���ά����
10. ʵ���䣺���������ľ�Ͻ���ϣ��������ܰ�װ�����������棬��ʵ���ۣ���ȫ������
����Ӳ��ģ������Ҫ��
1. AI����ϵͳ
1) ��AI CPU���ģ�CPUΪ64λ��������4���ģ�
2) ��AI GPU����: GPU������������120����
3) ��������������470GFLOPS
4) ��AI������չ��ӵ������4��USB3.0�ӿڣ�֧��HDMI��DP��Ƶ�ӿڣ�һ·M.2�ӿڵĵ�·PCIE������װ��ɢ�ȷ��ȣ�
5) �����ز���ϵͳ��Ubuntu 20.04 LTS+ROS_Melodic��
6) ����������IDE��:JupyterLab��
7) �����:Anaconda 4.5.4��
8) ֧��һϵ�����е� Al ��ܺ��㷨�� ���� TensorFlow��caffe/caffe2��Keras��Pytorch��MXNET �ȣ�
9) ϵͳ��װ��OpenCV������Ӿ��⣬TensorFlow AI��ܣ�Pytorch AI��ܣ�
10) ���������������ʶ��������̬ʶ������ָ������ȡ�AI�Ӿ�ʵ�������ּ���㷨ʵ�飻
2. ��AI���ѧϰ�Ӿ�Ӧ��
1) �ṩC���Ժ�Python������������Դ����
2) ֧��Docker�����������У�
3) ģ��֧�֣�MobileNet-v1��MobileNet-v2��SSD-Mobilenet-v2��YOLOv3��ResNet-18��ResNet-50�ȣ�
4) �����ٶȣ�ʵʱĿ�����ͼ����࣬����ʱ��
5) �����Ż�������CUDA���٣�����GPU���и�Ч�������ṩ���ӳٺ���������
6) ͼ����ࣺ�����ڴ������ݼ���ѵ�����ķ���������ʶ�������壻
7) �����⣺Ŀ���������ܹ���ÿ��֡�м����ͬ�Ķ�����ȡ���ǵı߽����ȷ��֡�и��������λ��
8) ����ָͨ����Ԥѵ����ͼ��ʶ��Ǹ�������о�������ʵ�ֵģ������ڻ�����֪�����ܹ���ÿ�����������ͬ��DZ�ڶ�������ܼ������ؼ����࣬��������ǰ���ͱ�����
9) ������̬����ʶ�𣺰�����λ�γɹǼ����˽ṹ�ĸ������岿λ���ṩ��Ԥѵ��ģ�ͣ�������������ֲ���̬���ƣ��ܹ���ÿ֡�м�������
10) ����ʶ�𣺶�һϵ����Ƶ֡�з����Ļ����Ϊ�����ƽ��з��ࣻ
11) �����Ƴ�������һ�����룬��ͼ���ǰ���뱳���ָ���������������滻��ģ��������
12) ��Ŀ��ȣ��ܹ��ӵ�Ŀͼ���ƶ������ȵ����������
3. �������˶�ѧ��ROS������ϵͳ
1) ���ʣ����������������Ͻ�
2) ���������15Kg*5+6Kg*1���ܴ������߶����
3) ��е�����ɶȣ�5���ɶ�+�г�����200g��Ч���أ���չ350mm��
4) ����ͷ������USB�ӿڣ�30�����أ�110�ȹ������ͷ��480P�ֱ��ʣ�600*480����
5) �ӿڣ�3�����߶���ӿڣ�i2C�ӿڣ�
6) ��OLED:��ʾCPUռ�ã���ʾ�ڴ�ռ�ã���ʾIP��ַ�Ȼ�����Ϣ��
7) ֧��PC��λ�����ƣ�
8) ��PC��λ��֧��FPV��һ�ӽǿ��ƣ�����ʾ3D����ģ�ͣ������ԶԻ�е�۽���ʵʱ���棬��ʾ��е�۶��������3Dͼ�ζԻ�е�۽��п��ƣ�
9) ��֧��ROS�����˲���ϵͳ��
10) ������2����
11) ��������1����
12) Mirco USB�ӿڣ�
4. AI����ϵͳ
1) �����USB�ӿ���ƣ�����SSS1629��ƵоƬ������������ϵͳ����;
2) ���������������MEMS����˷磬����������¼�������ʸ��ѣ�
3) ���ر�3.5mm�����ӿڣ���ͨ����Ӷ����������֣�
4) ����˫ͨ�����Ƚӿڣ���ֱ��������������
5) ���������������ڰ�ť��������ں��ʵ�������
5. ���������ʶ��
1) �������Anaconda 4.5.4��
2) �㷨������CUDA��CUDNN��PyTorch��Tensorboard��
3) ���ģ�ͣ�Mobilenet_v2��
4) ���õ�����Ϊ�������ź���STFT��ת��Ϊ����ʱƵͼ��
5) ������shortcut���ƣ���������������ȵ����Ӵ������ݶ���ɢ��
6) ��������ʾ����������ʣ���չʾͼƬЧ����
7) �������ࣺ������5�ࣻ
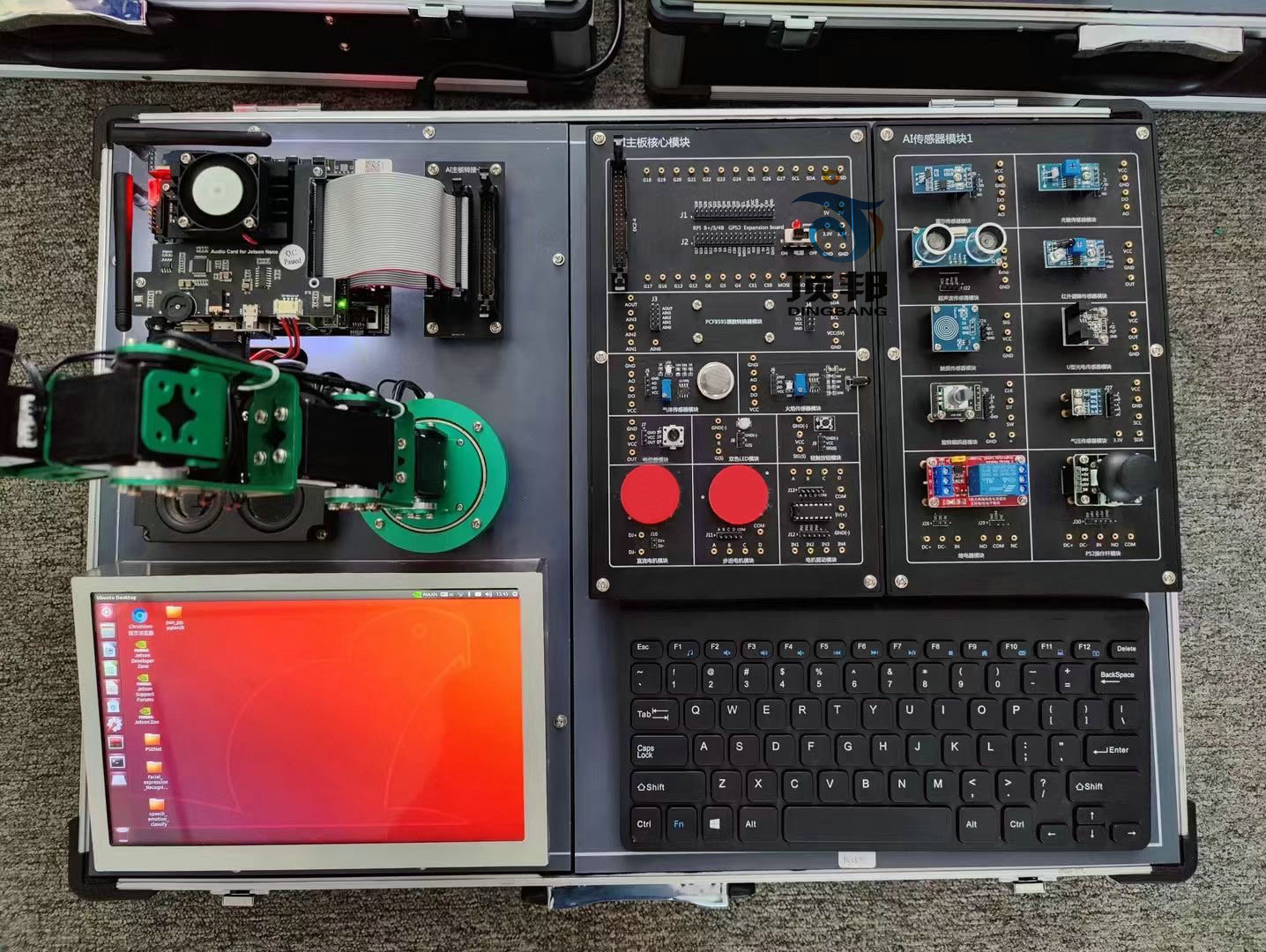
6. ����GPIO�봫����ʵ��ģ��
1) ˫ɫLED��5mm����˫ɫLEDָʾ�ƣ����������裻
2) �̵�����5V���磬1·������룬֧�ָ�/�͵�ƽ������
3) �ᴥ���ذ�������ͨ�������أ��Զ���λ��
4) U ��紫���� ��ʹ�ý��ڲ�����������ۿ���10.5mm,�����״ָ̬ʾ�ƣ����ֿ����������
5) ģ��ת��������Դ������8λCOMS��A/D��D/Aת��оƬ��������4·ģ��������ͨ����һ·ģ�������ͨ����1��I2C���߽ӿڣ�
6) PS2 ���ݸˣ�ģ�����·ģ�������һ·��������ӿڣ�
7) �����20K�����
8) ģ�����������������Ϊ�Ÿ�Ӧǿ�ȣ������״ָ̬ʾ�ƣ����ֿ����������AO��ѹ�����
9) �����������������ڹ��ЧӦ�������״ָ̬ʾ�ƣ����ֿ����������AO��ѹ�����
10) ���汨�������Լ�������߲�����760nm-1100nm��Χ�ڵĹ�Դ���������Ի������Ϊ80cm,̽��Ƕ�60�ȣ���������Ӧʱ��<1s��
11) ���崫����������������뵼�壨MOS�������崫���������Լ��LPG���̡��ơ����顢���������顢��һ����̼��Ũ�ȴ�200-10000PPM��
12) �������أ����õ���ʽ����������������װ�ڷǽ���������棻
13) �����������������⣺��Ӧ�ǶȲ�����15�ȣ�̽�����2-450cm,���ȿɴ�0.3cm;
14) ��ת��������A��B������������˳ʱ�뷽����תʱ��A�೬ǰB��90�ȣ���ʱ�뷽����תʱ��B�೬ǰA��90��;
15) ������ϴ�����:�������1mm~25mm���ã�
16) ��ѹ��������ѹ����Χ��300~1100hPa���ֱ���Ϊ0.03hPa��
17) �����Ǽ��ٶȴ�������оƬ����16bit ADת����,16λ��������������Ƿ�Χ��±250 500 1000 2000 °/s�����ٶȷ�Χ��±2±4±8±16g��
18) ѭ��������:������1-8mm,�������Ϊ2.5mm��
19) ֱ���������ģ��:��������0.35-0.4A������᳤9mm��
20) �����������ģ��:�����Ƕȣ�5.625 x 1/64,���ٱȣ�1/64��
7.������Դ��
1) ����ʾ����10����ʾ����HDMI�ӿڣ��ֱ���Ϊ1080P����ʾ����б��װ����б�Ƕȴ���5°��
2) ������꣺�ɵ�ع��磬�������ӣ�
3) ģ������Ͱ���ߴ磺≥90*80*103mm��
4) �����ľ��������4����
5) ���ߣ�1.5�ף�
6) ������ʵ��ָ���飺������500ҳ��
7) �ṩ���룺������50����
8) ���ṩ�˹�����רҵ�μ����̲ģ�
8.�������˹����ܼ����μ���ѧϵͳ��Ӧ���еĽ̲ģ����ݷḻ���������ȡ�����������ö�ý��μ���ѧϵͳ�����Ժܴ�̶��ϼ�����ʦ���εĹ�������
��1���ṩ������λ“�˹����ܼ����μ���ѧϵͳ”����Ȩ֤�鸴ӡ���Ӹǵ�λ���£�
��2���ṩ������λ“��Ȩ��”ԭ�����ǹ��£�
��3��Ϊ�˽�ѧ��ͳһ��Ҫ���˹����ܼ����μ���ѧϵͳ��ʵѵװ����ͬһ�������̣�
(������������):
��1���߽��˹�����
��2�� ֪ʶ��ʾ
��3�� ȷ��������
��4�� ��������
��5�� ��ȷ��������
��6�� ��������
��7�� ����ѧϰ
��8�� ר��ϵͳ
��9�� ��Ȼ���Դ���
��10�� �ֲ�ʽ�˹�������Agent
��11�� �˹��������������е�Ӧ��
��12�� �˹������ھ��������е�Ӧ��
����ʵ����ĿҪ��
1. �û���������
2. ����������ʵ��
3. OLED����ʵ��
4. ���Ƶ������
5. ͬʱ����6���������
6. ��ȡ�����ǰλ��
7. ��е�۹ؽڱ궨ʵ��
8. ��е�۹ؽڻ��ȼ�ĩ����̬����
9. ��е���赸����
10. ��е�۰���ɫ��ʵ��
11. ��е�۰������ɫ��ʵ��
12. ��е��ץȡ��������ŵ�궨
13. ��е��ץȡ��������������
14. ��װ��ʹ��Matplotlib��Pyplot �� Numpy
15. ��OpenCV����������ͷ
16. JetCam���в���USB����ͷ
17. OpenCV��ȡ��д�����ʾͼ��
18. OpenCV��ȡ����ʾ�ͱ�����Ƶ
19. OpenCV��ͼ����ʹ��
20. OpenCVͼ�����������ز���
21. OpenCVͼƬ����
22. OpenCVͼƬƽ��
23. OpenCVͼƬ����
24. OpenCV����任
25. OpenCVͼƬ����
26. OpenCVͼƬ��ת
27. OpenCVͼƬ����
28. OpenCV�Ҷȴ���
29. OpenCVͼ������
30. OpenCV��Ե���
31. OpenCV��ֵ������
32. OpenCV����Բ�λ���
33. OpenCV����ͼƬ����
34. OpenCV�߶λ���
35. OpenCV��ɫͼƬֱ��ͼ
36. OpenCVֱ��ͼ���⻭
37. OpenCVͼƬ��
38. OpenCV������ǿ
39. OpenCV��˹��ֵ�˲�
40. OpenCVĥƤ����
41. OpenCV��ֵ�˲�
42. ��ɫ���
43. �������۾����
44. ���˼��
45. �������
46. ���Ƽ��
47. Ŀ����
48. ��λ����ʵʱλ��
49. ����ͷ��е��������
50. ����ͷ��е��������
51. ɫ��ץȡ�ּ�ʵ��
52. AI�˹����ܻ�е�������˻���ʵ��
53. AI�˹����ܻ�е������ʶ��ץȡָ��ɫ��������
54. AI�˹����ܻ�е����������ʵ��
55. ͼ�����
56. ������
57. ����ָ�
58. ������̬����ʶ��
59. �����Ƴ�
60. �������ͼ
61. Ŀ����
62. AI���������ϳ�ʵ��
63. AI������д��ʽʵ��
64. ͼ�������ʵ��
65. AIȫ��·�˻���������ʵ��
66. AI�����������Ի�ʵ��
67. SnowBoy��������ʵ��
68. �������ʶ��
69. �ṩ������20��GPIO�����봫����ʵ��ģ��
��ز�Ʒ��
X
��������ʶ���ά��
�źţ�13817525788
������źŸ��ƣ����Ӻ��ѣ�
����
�ź��Ѹ��ƣ������������ѯ���飡